Autonoomsed sõidukid abiks erivajadustega inimestele: Difference between revisions
Ahto.jalak (talk | contribs) |
|||
| (33 intermediate revisions by 3 users not shown) | |||
| Line 1: | Line 1: | ||
[[File:Toyota-concept-i-ride.jpg| | [[File:Toyota-concept-i-ride.jpg|800px|right]] | ||
=Sissejuhatus= | =Sissejuhatus= | ||
Tehnoloogia arengus on automatiseerimisel olnud alati keskne roll. Idee, et masinad võiksid midagi inimese eest ära teha, on muutumas aja jooksul pigem vajaduseks. Lisaks sellele, kuidas on masin tehniliselt konstrueeritud, on seejuures väga tähtis ka masina juhtimine. Viimasel ajal on mitmetes valdkondades seadmete juhtimist püütud arvutile üle anda ning üsna edukalt seda tehtud näiteks autonoomsete sõidukite vallas. Autonoomsed sõidukid on kiiresti kasvav trend ja üha rohkem tuleb turule uusi teenusepakkujaid, kes on mõtlemas välja uusi lahendusi. Üha enam räägitakse ka autonoomsete sõidukite kasulikkusest erivajadustega inimestele ning mis moel need võiksid igapäevatoimetustes neile abiks olla. | Tehnoloogia arengus on automatiseerimisel olnud alati keskne roll. Idee, et masinad võiksid midagi inimese eest ära teha, on muutumas aja jooksul pigem vajaduseks. Lisaks sellele, kuidas on masin tehniliselt konstrueeritud, on seejuures väga tähtis ka masina juhtimine. Viimasel ajal on mitmetes valdkondades seadmete juhtimist püütud arvutile üle anda ning üsna edukalt seda tehtud näiteks autonoomsete sõidukite vallas. Autonoomsed sõidukid on kiiresti kasvav trend ja üha rohkem tuleb turule uusi teenusepakkujaid, kes on mõtlemas välja uusi lahendusi. Üha enam räägitakse ka autonoomsete sõidukite kasulikkusest erivajadustega inimestele ning mis moel need võiksid igapäevatoimetustes neile abiks olla. | ||
Antud töö eesmärgiks on tutvustada autonoomseid sõidukeid ning nendega seonduvaid erinevaid aspekte, lähtudes justnimelt erivajadustega inimeste vaatenurgast. Järgnevates peatükkides tutvustatakse autonoomsete sõidukite ajalugu, millisel arenguetapil on need praeguse seisuga ning puudutakse mõneti ka autonoomsete sõidukite tulevikuvisiooni teemat. Antakse ülevaadet kasutatavast tehnoloogiast ning tuuakse välja isejuhtivate sõidukite autonoomsuse erinevaid tasemeid. Samuti käsitletakse erinevaid kasutusalasid ning seda kuidas need erivajadustega inimeste elu lihtsustavad. | Antud töö eesmärgiks on tutvustada autonoomseid sõidukeid ning nendega seonduvaid erinevaid aspekte, lähtudes justnimelt erivajadustega inimeste vaatenurgast. Järgnevates peatükkides tutvustatakse autonoomsete sõidukite ajalugu, millisel arenguetapil on need praeguse seisuga ning puudutakse mõneti ka autonoomsete sõidukite tulevikuvisiooni teemat. Antakse ülevaadet kasutatavast tehnoloogiast ning tuuakse välja isejuhtivate sõidukite autonoomsuse erinevaid tasemeid. Samuti käsitletakse erinevaid kasutusalasid ning seda kuidas need erivajadustega inimeste elu lihtsustavad. | ||
= Mis on autonoomsed sõidukid ja kuidas need töötavad? = | = Mis on autonoomsed sõidukid ja kuidas need töötavad? = | ||
[[File:Starship in Snow.jpeg|300px|thumb|right|Pakirobot Starship <ref>Starship in snow https://www.purdue.edu/newsroom/stories/2019/images/Starship%20in%20Snow.jpg</ref>]] | |||
Autonoomne sõiduk on üldjoontes sõiduk, mis suudab end ise juhtida. Sellel puudub (teoorias) vajadus inimese sekkumisele. Sellised on näiteks lennukid, millel on autopiloot, Starshipi pakirobotid, juhiabidega autod jm. | Autonoomne sõiduk on üldjoontes sõiduk, mis suudab end ise juhtida. Sellel puudub (teoorias) vajadus inimese sekkumisele. Sellised on näiteks lennukid, millel on autopiloot, Starshipi pakirobotid, juhiabidega autod jm. | ||
| Line 16: | Line 18: | ||
'''Sõiduk'''<ref>"Sõiduk" Sõnaveebis https://sonaveeb.ee/search/unif/dlall/dsall/s%C3%B5iduk/1</ref> - sõitmiseks, liiklemiseks mõeldud vahend | '''Sõiduk'''<ref>"Sõiduk" Sõnaveebis https://sonaveeb.ee/search/unif/dlall/dsall/s%C3%B5iduk/1</ref> - sõitmiseks, liiklemiseks mõeldud vahend | ||
===Kuidas autonoomsus luuakse?=== | |||
=== Kuidas autonoomsus luuakse? === | Autonoomsuse loomiseks kasutatakse erinevaid sensoreid, et koguda ümbritsevast maailmast võimalikult palju andmeid. Neid andmeid analüüsitakse pidevalt, et sõiduk oleks koguaeg väliskeskkonnaga kursis. [[File:autonomous-car-sensors-F6.png|300px|thumb|left|Autonoomse auto sensorid <ref>Autonomous car sensors https://api.intechopen.com/media/chapter/56860/media/F6.png</ref>]] | ||
Autonoomsuse loomiseks kasutatakse erinevaid sensoreid, et koguda ümbritsevast maailmast võimalikult palju andmeid. Neid andmeid analüüsitakse pidevalt, et sõiduk oleks koguaeg väliskeskkonnaga kursis. | |||
Seadmed, mida kasutatakse<ref>How Self-driving Cars Work: Sensor Systems https://www.udacity.com/blog/2021/03/how-self-driving-cars-work-sensor-systems.html</ref>: | Seadmed, mida kasutatakse<ref>How Self-driving Cars Work: Sensor Systems https://www.udacity.com/blog/2021/03/how-self-driving-cars-work-sensor-systems.html</ref>: | ||
*[https://et.wikipedia.org/wiki/Lidar '''Lidar (LiDAR''')] – seade saadab välja tuhandeid | *[https://et.wikipedia.org/wiki/Lidar '''Lidar (LiDAR''')] – seade saadab välja tuhandeid infrapunakiiri ja mõõdab nende naasmisaega. Selle põhjal arvutatakse objekti kaugus seadmest. Kasutusel pigem lühidistantsidel objekti täpse kuju tuvastamiseks. Nõrkuseks on pime keskkond ja halvad ilmastikuolud. | ||
*[https://et.wikipedia.org/wiki/Radar '''Radar'''] – saadab välja raadiolaineid ning ootab nende naasmist. Lainetega saab tuvastada objektide kaugust, kiirust, nurki. Töötab pikematel distantsidel ning enamikes ilmastikutingimustes. | *[https://et.wikipedia.org/wiki/Radar '''Radar'''] – saadab välja raadiolaineid ning ootab nende naasmist. Lainetega saab tuvastada objektide kaugust, kiirust, nurki. Töötab pikematel distantsidel ning enamikes ilmastikutingimustes. | ||
*[https://et.wikipedia.org/wiki/Sonar '''Sonar'''] – on nii aktiivset kui passiivset kasutust. Passiivne kuulab ümbruskonna hääli. Aktiivne saadab ise helilaineid välja ja ootab kaja. Kasutatakse väikestel vahemaadel suurte objektide paigutamiseks, kuna ei vaja valgust. Töötab | *[https://et.wikipedia.org/wiki/Sonar '''Sonar'''] – on nii aktiivset kui passiivset kasutust. Passiivne kuulab ümbruskonna hääli. Aktiivne saadab ise helilaineid välja ja ootab kaja. Kasutatakse väikestel vahemaadel suurte objektide paigutamiseks, kuna ei vaja valgust. Töötab maksimaalselt helikiirusel. | ||
*'''Kaamera''' – kaameraid kasutatakse objektide eristamiseks. Lidari ja radariga ei ole väga lihtne eristada üht objekti teisest. Kaamerapilt käib läbi tarkvara, mis tuvastab milliseid objekte kaamera hetkel näeb. Kasutatakse liiklusmärkide, inimeste, loomade, autode, okste jms tuvastamisel ja eristamisel. | *'''Kaamera''' – kaameraid kasutatakse objektide eristamiseks. Lidari ja radariga ei ole väga lihtne eristada üht objekti teisest. Kaamerapilt käib läbi tarkvara, mis tuvastab milliseid objekte kaamera hetkel näeb. Kasutatakse liiklusmärkide, inimeste, loomade, autode, okste jms tuvastamisel ja eristamisel. | ||
*'''Sisemised liikumissensorid''' – nt [https://et.wikipedia.org/wiki/Kiirendusandur kiirendussensor], [https://et.wikipedia.org/wiki/G%C3%BCroskoop güroskoop]. Auto liikumisparameetrite määramiseks. | *'''Sisemised liikumissensorid''' – nt [https://et.wikipedia.org/wiki/Kiirendusandur kiirendussensor], [https://et.wikipedia.org/wiki/G%C3%BCroskoop güroskoop]. Auto liikumisparameetrite määramiseks. | ||
*[https://et.wikipedia.org/wiki/GPS '''GPS'''] – kasutusel muude sensorite pildi paigutamiseks pärismaailma. Ülejäänud sensorid loovad sõidukile ette lokaalse pildi, kuid see ei ole seotud sõiduki üldise asukohaga. | *[https://et.wikipedia.org/wiki/GPS '''GPS'''] – kasutusel muude sensorite pildi paigutamiseks pärismaailma. Ülejäänud sensorid loovad sõidukile ette lokaalse pildi, kuid see ei ole seotud sõiduki üldise asukohaga. GPSi andmete põhjal leitakse sõiduki asukoht. | ||
=== Autonoomsuse kuus taset === | === Autonoomsuse kuus taset === | ||
[[File:Autonoomsus.png|400px|thumb|right|Autonoomsuse tasemed<ref>https://miro.medium.com/max/1400/1*FaHyQ7EO6qvoFPYQY5tOrg.png</ref>]] | [[File:Autonoomsus.png|400px|thumb|right|Autonoomsuse tasemed<ref>Autonoomsuse tasemed https://miro.medium.com/max/1400/1*FaHyQ7EO6qvoFPYQY5tOrg.png</ref>]] | ||
Aastal 2004 on Ameerika autotööstuse inseneride selts (SAE)<ref>SAE Levels of Driving Automation™ Refined for Clarity and International Audience https://www.sae.org/blog/sae-j3016-update</ref> andnud välja dokumendi, mille järgi klassifitseeritakse autonoomsust kuueks alamtasemeks. Esimese kolme taseme puhul (0-2) peab juht ümbrust arvestama ning ise sõidukit juhtima ehk põhimõtteliselt sõidukil autonoomsus puudub. | Aastal 2004 on Ameerika autotööstuse inseneride selts (SAE)<ref>SAE Levels of Driving Automation™ Refined for Clarity and International Audience https://www.sae.org/blog/sae-j3016-update</ref> andnud välja dokumendi, mille järgi klassifitseeritakse autonoomsust kuueks alamtasemeks. Esimese kolme taseme puhul (0-2) peab juht ümbrust arvestama ning ise sõidukit juhtima ehk põhimõtteliselt sõidukil autonoomsus puudub. Sõiduk tasemel 3-5 suudab, kas mingil määral või täielikult ise sõita. | ||
SAE defineerib<ref>SAE Levels of Driving Automation https://blog.ansi.org/sae-levels-driving-automation-j-3016-2021/</ref> kuus erinevat taset sõiduki autonoomsuse hindamiseks: | SAE defineerib<ref>SAE Levels of Driving Automation https://blog.ansi.org/sae-levels-driving-automation-j-3016-2021/</ref> kuus erinevat taset sõiduki autonoomsuse hindamiseks: | ||
| Line 39: | Line 42: | ||
*'''Tase 1''' – sõiduk suudab juhti abistada roolimise, kiirendamise ja pidurdamisega | *'''Tase 1''' – sõiduk suudab juhti abistada roolimise, kiirendamise ja pidurdamisega | ||
*'''Tase 2''' – sõiduk suudab ise sooritada kiirendamist ja pidurdamist teatud tingimustes, kuid juht peab olema kogu tähelepanuga sõitmise juures | *'''Tase 2''' – sõiduk suudab ise sooritada kiirendamist ja pidurdamist teatud tingimustes, kuid juht peab olema kogu tähelepanuga sõitmise juures | ||
*'''Tase 3'''– sõiduk suudab teatud tingimustes ise sõita, kuid juht peab olema alati valmis üle võtma kui sõiduk seda nõuab | *'''Tase 3''' – sõiduk suudab teatud tingimustes ise sõita, kuid juht peab olema alati valmis üle võtma, kui sõiduk seda nõuab | ||
*'''Tase 4''' – sõiduk suudab iseseisvalt (ilma inimese järelvalveta) sõita teatud tingimustes | *'''Tase 4''' – sõiduk suudab iseseisvalt (ilma inimese järelvalveta) sõita teatud tingimustes | ||
*'''Tase 5''' | *'''Tase 5''' – sõiduk suudab täiesti ise sõita | ||
= Autonoomne sõiduk ei ole ainult isesõitev auto = | = Autonoomne sõiduk ei ole ainult isesõitev auto = | ||
| Line 55: | Line 63: | ||
Kaubavedu mängib meie majanduses olulist rolli. Tehnoloogilise innovatsiooni kiirus ja e-kaubanduse kasv muudab kaupade transportimise viise. Kaubavedajad otsivad pidevalt lahendusi, kuidas transportida kaupu tõhusamalt ja ohutumalt. Tulenevalt sellest, et suurt rolli mängivad kauba transporimisel '''veoautod''', siis on vajalik innovatsioon veoautode kategoorias. Veoautode arendusega tegelevad näiteks: [https://torc.ai/trucking/ '''Torc'''] (Daimler/Mercedes-Benz), [https://aurora.tech/ '''Aurora'''], [https://www.tusimple.com/ '''TuSimple'''], [https://embarktrucks.com/ '''Embark''']. | Kaubavedu mängib meie majanduses olulist rolli. Tehnoloogilise innovatsiooni kiirus ja e-kaubanduse kasv muudab kaupade transportimise viise. Kaubavedajad otsivad pidevalt lahendusi, kuidas transportida kaupu tõhusamalt ja ohutumalt. Tulenevalt sellest, et suurt rolli mängivad kauba transporimisel '''veoautod''', siis on vajalik innovatsioon veoautode kategoorias. Veoautode arendusega tegelevad näiteks: [https://torc.ai/trucking/ '''Torc'''] (Daimler/Mercedes-Benz), [https://aurora.tech/ '''Aurora'''], [https://www.tusimple.com/ '''TuSimple'''], [https://embarktrucks.com/ '''Embark''']. | ||
Linnastumine ja autode arvu kasv linnakeskkonnas on tänapäeval suur probleem, mis survestab välja mõtlema innovatsiivseid lahendusi kuidas linnaruumi ja transpordi keskkonda muuta inimeste ja keskkonna sõbralikumaks. Innovatsioon '''busside''' tootmisel, mis parandab inimeste transportimist linnaruumis on eesmärk omaette, millega näiteks tegelevad ettevõtted: | Linnastumine ja autode arvu kasv linnakeskkonnas on tänapäeval suur probleem, mis survestab välja mõtlema innovatsiivseid lahendusi, kuidas linnaruumi ja transpordi keskkonda muuta inimeste ja keskkonna sõbralikumaks. Innovatsioon '''busside''' tootmisel, mis parandab inimeste transportimist linnaruumis on eesmärk omaette, millega näiteks tegelevad ettevõtted: eestlaste projekt [https://iseauto.taltech.ee/ '''Iseauto'''], soomlaste projekt [https://sensible4.fi/solutions/ '''Sensible 4''']. | ||
Põllumajanduses on kasutusel mitmed autonoomsed põllutöömasinaid, näiteks '''kombainid''' ja '''traktorid''' – näiteks ettevõte [https://asirobots.com/companies/ '''ASI Robotics'''] tegeleb autonoomse rasketehnika välja arendamisega ja [https://global.honda/ '''Honda'''] tuli välja rea prototüüpidega, muu hulgas ka põllumajandusvaldkonna tehnikaga <ref>Honda tests self-driving, off-road “Autonomous Work Vehicles” https://newatlas.com/honda-3e-d18-autonomous-work-vehicles/57719/</ref>. | Põllumajanduses on kasutusel mitmed autonoomsed põllutöömasinaid, näiteks '''kombainid''' ja '''traktorid''' – näiteks ettevõte [https://asirobots.com/companies/ '''ASI Robotics'''] tegeleb autonoomse rasketehnika välja arendamisega ja [https://global.honda/ '''Honda'''] tuli välja rea prototüüpidega, muu hulgas ka põllumajandusvaldkonna tehnikaga <ref>Honda tests self-driving, off-road “Autonomous Work Vehicles” https://newatlas.com/honda-3e-d18-autonomous-work-vehicles/57719/</ref>. | ||
| Line 77: | Line 85: | ||
Self-driving technology to transform urban waterways. https://roboat.org/</ref>. | Self-driving technology to transform urban waterways. https://roboat.org/</ref>. | ||
[https://www.wam-v.com/ '''Marine Advanced Robotics'''] tegeleb autonoomsete laevade ja isejuhitavate paatide arendamisega, mida saab põhiliselt kasutada '''mereseireks''' ja '''andmetekogumiseks''', eesmärgiga muuta valdkond turvalisemaks ja kuluefektiivsemaks võrreldes meeskonda eeldava meetodiga. Selliseid paate saab kasutada ka sellistes olukordades, kus tavapärase suurusesega paate kasutada ei saa <ref>Autonomous surface vessels (ASVs) https://www.aims.gov.au/research/technology/reefscan/autonomous-surface-vessel</ref>. | [https://www.wam-v.com/ '''Marine Advanced Robotics'''] tegeleb autonoomsete laevade ja isejuhitavate paatide arendamisega, mida saab põhiliselt kasutada '''mereseireks''' ja '''andmetekogumiseks''', eesmärgiga muuta valdkond turvalisemaks ja kuluefektiivsemaks, võrreldes meeskonda eeldava meetodiga. Selliseid paate saab kasutada ka sellistes olukordades, kus tavapärase suurusesega paate kasutada ei saa <ref>Autonomous surface vessels (ASVs) https://www.aims.gov.au/research/technology/reefscan/autonomous-surface-vessel</ref>. | ||
= Autonoomsete sõidukite kasutusalad = | = Autonoomsete sõidukite kasutusalad = | ||
| Line 83: | Line 96: | ||
Peamiseks kasutusalaks transport. | Peamiseks kasutusalaks transport. | ||
'''Esimeseks autonoomseks sõidukiks''' võib lugeda da vinci „Self-Proppeled“ käru 15. sajandil <ref>A Brief History of Autonomous Vehicle Technology | WIRED https://www.wired.com/brandlab/2016/03/a-brief-history-of-autonomous-vehicle-technology/</ref>. Käru kasutas spiraalvedrusid ning temaga oli võimalik teekonna suunda muuta ja pidurdada. Masinal tuli kõigepealt valida soovitud suund ning piduri lahti laskmisel hakkas masin valitud suunas iseseisvalt edasi liikuma. Esimene töötav prototüüp valmis aastal 2006 Itaalias. <ref>https://editions.covecollective.org/chronologies/self-propelled-cart</ref> [[File:Leonardo_da_Vinci_Self_Propelled_Cart.jpg|300px|left|thumb|Leonardo da Vinci käru <ref>Leonardo da Vinci Self Propelled Cart https://upload.wikimedia.org/wikipedia/commons/7/7a/Leonardo_da_Vinci_Self_Propelled_Cart.jpg</ref>]] | '''Esimeseks autonoomseks sõidukiks''' võib lugeda da vinci „Self-Proppeled“ käru 15. sajandil <ref>A Brief History of Autonomous Vehicle Technology | WIRED https://www.wired.com/brandlab/2016/03/a-brief-history-of-autonomous-vehicle-technology/</ref>. Käru kasutas spiraalvedrusid ning temaga oli võimalik teekonna suunda muuta ja pidurdada. Masinal tuli kõigepealt valida soovitud suund ning piduri lahti laskmisel hakkas masin valitud suunas iseseisvalt edasi liikuma. Esimene töötav prototüüp valmis aastal 2006 Itaalias. <ref>Self-Propelled Cart https://editions.covecollective.org/chronologies/self-propelled-cart</ref> [[File:Leonardo_da_Vinci_Self_Propelled_Cart.jpg|300px|left|thumb|Leonardo da Vinci käru <ref>Leonardo da Vinci Self Propelled Cart https://upload.wikimedia.org/wikipedia/commons/7/7a/Leonardo_da_Vinci_Self_Propelled_Cart.jpg</ref>]] | ||
Aastal 1933 pandi alus tänapäeva '''autopilootidele'''. Autopilooti kandis nime | Aastal 1933 pandi alus tänapäeva '''autopilootidele'''. Autopilooti kandis nime Mechanical Mike ning seda kasutades seati 30ndatel maailmarekord, lennates ümber maailma kaheksa päevaga. Mechanical Mike oli esimene autopiloot, mis ei kasutanud elektrit.<ref>Mohler, Stanley R.; Bobby H. Johnson | ||
Wiley Post, His Winnie Mae, And The World's First Pressure Suit; Smithsonian Annals Of Flight, Number 8 https://dodlithr.blogspot.com/2013/07/mechanical-mike-1930s-forefather-of.html</ref> | Wiley Post, His Winnie Mae, And The World's First Pressure Suit; Smithsonian Annals Of Flight, Number 8 https://dodlithr.blogspot.com/2013/07/mechanical-mike-1930s-forefather-of.html</ref> | ||
Aastal 1945 leiutas Ralph Teetor '''püsikiirusehoidja'''. Räägitakse, et Teetor sõitis advokaadiga ja advokaat võttis rääkides hoogu maha ja kuulates kiirendas. Selline ebaühtlane sõiduviis häiris Teetori nii väga, et ta otsustas leiutada püsikiirusehoidja. Arvatavasti oli tegelikke põhjuseid rohkem. <ref>The Sightless Visionary Who Invented Cruise Control https://www.smithsonianmag.com/innovation/sightless-visionary-who-invented-cruise-control-180968418/</ref> | Aastal 1945 leiutas Ralph Teetor '''püsikiirusehoidja'''. Räägitakse, et Teetor sõitis advokaadiga ja advokaat võttis rääkides hoogu maha ja kuulates kiirendas. Selline ebaühtlane sõiduviis häiris Teetori nii väga, et ta otsustas leiutada püsikiirusehoidja. Arvatavasti oli tegelikke põhjuseid rohkem. <ref>The Sightless Visionary Who Invented Cruise Control https://www.smithsonianmag.com/innovation/sightless-visionary-who-invented-cruise-control-180968418/</ref> | ||
=== Olevik === | === Olevik === | ||
[[File:ANYmal-Package-Delivery-CES-2019-1024x768.jpeg|300px|right|thumb| | [[File:ANYmal-Package-Delivery-CES-2019-1024x768.jpeg|300px|right|thumb|Continentali kontseptsioon pakirobotist<ref>Robotic Package Delivery with ANYmal https://www.anybotics.com/wp-content/uploads/2019/07/ANYmal-Package-Delivery-CES-2019-1024x768.jpg</ref>]] Autonoomsed sõidukid on kasutusel pea kõikjal. Peamiselt inimeste ja kauba transportimiseks, aga ka meelelahutuse ja teaduse eesmärgil. | ||
Erivajadustega inimeste elu võimaldavad lihtsustada pakirobotid ja ka uuemad sõiduautod. Abi pakuvad ka robottolmuimejad ja robotmuruniidukid, kui võtta neid kui autonoomseid sõidukeid. | Erivajadustega inimeste elu võimaldavad lihtsustada pakirobotid ja ka uuemad sõiduautod. Abi pakuvad ka robottolmuimejad ja robotmuruniidukid, kui võtta neid kui autonoomseid sõidukeid. | ||
==== Igapäevaelus ==== | ==== Igapäevaelus ==== | ||
| Line 117: | Line 136: | ||
==== Meelelahutus ==== | ==== Meelelahutus ==== | ||
Formula Student on peamiselt tudengitele mõeldud tootearendusvõistlus. Võistluse jaoks tuleb ehitada isejuhtiv vormel, mis peab läbima erinevad katsed võimalikult kiiresti. <ref>The Formula Student https://www.formulastudent.ee/</ref> | Formula Student on peamiselt tudengitele mõeldud tootearendusvõistlus. Võistluse jaoks tuleb ehitada isejuhtiv vormel, mis peab läbima erinevad katsed võimalikult kiiresti. <ref>The Formula Student https://www.formulastudent.ee/</ref> | ||
=== Tulevik === | === Tulevik === | ||
| Line 122: | Line 142: | ||
Tulevikus kindlasti suureneb autonoomsete sõidukite kasutus igapäevaelus ja selle arvelt väheneb katsetamisel olev valdkond. | Tulevikus kindlasti suureneb autonoomsete sõidukite kasutus igapäevaelus ja selle arvelt väheneb katsetamisel olev valdkond. | ||
Paljude visioon on, et autonoomsed sõidukid asendavad inimesi- ja/või kaupa transportivad sõidukid täielikult või vähemalt osaliselt. Antud tegevus muudaks liikluse kiiremaks ning oleks ka keskkonnasõbralikum. Lisaks peaks see olema ka ohutum, sest näiteks | Paljude visioon on, et autonoomsed sõidukid asendavad inimesi- ja/või kaupa transportivad sõidukid täielikult või vähemalt osaliselt. Antud tegevus muudaks liikluse kiiremaks ning oleks ka keskkonnasõbralikum. Lisaks peaks see olema ka ohutum, sest näiteks USA-s on liiklusõnnetuste põhjuseks 94% ajast inimviga <ref>Waymo https://waymo.com</ref>. | ||
Isesõitvad autod võimaldaksid autoga sõitmise võimalust inimestele, kellel varem selleks võimalust polnud, kehva tervise või mingi muu põhjuse tõttu. | Isesõitvad autod võimaldaksid autoga sõitmise võimalust inimestele, kellel varem selleks võimalust polnud, kehva tervise või mingi muu põhjuse tõttu. | ||
| Line 131: | Line 151: | ||
Mis on erivajadus? Antud kontekstis on erivajaduse mõiste tihedalt seotud puude mõistega. ÜRO puuetega inimeste õiguste konventsiooni kohaselt hõlmab puuetega inimeste mõiste isikuid, kellel on pikaajaline füüsiline, vaimne, intellektuaalne või meeleline kahjustus, mis võib koostoimel erinevate takistustega tõkestada nende täielikku ja tõhusat osalemist ühiskonnaelus teistega võrdsetel alustel. Järelikult, puudest tingitud erivajadus on vajadus muuta ja kohandada keskkonda ja tegevusi, et tagada maksimaalsed võimalused iseseisvaks toimetulekuks. | Mis on erivajadus? Antud kontekstis on erivajaduse mõiste tihedalt seotud puude mõistega. ÜRO puuetega inimeste õiguste konventsiooni kohaselt hõlmab puuetega inimeste mõiste isikuid, kellel on pikaajaline füüsiline, vaimne, intellektuaalne või meeleline kahjustus, mis võib koostoimel erinevate takistustega tõkestada nende täielikku ja tõhusat osalemist ühiskonnaelus teistega võrdsetel alustel. Järelikult, puudest tingitud erivajadus on vajadus muuta ja kohandada keskkonda ja tegevusi, et tagada maksimaalsed võimalused iseseisvaks toimetulekuks. | ||
[[File:Taxi-d.jpeg| | [[File:Taxi-d.jpeg|290px|thumb|left|Erivajadustega inimeste probleem taksoteenusele ligipääsemisel New Yorgis <ref>NYC Ordered to Accommodate Taxi Riders With Disabilities https://abilitymagazine.com/images/taxi-d.jpg</ref>]] Puuetega inimeste olukord ühiskonnas läheb viimastel aastatel paremaks, sest nad õpivad avalikult rääkima oma vajadustest, ühiskond aga õpib neid paremini aitama, neile rehabilitatsiooni võimalusi looma.<ref>Erivajaduse mõiste, https://www.tlu.ee/opmat/ts/TST7006/erivajadus_ja_sellega__seotud_misted_rekreatsioonis_ja_tegevuste_planeerimise_phialused.html</ref> | ||
Transport on selline osa meie igapäevaelust, mis erivajadustega inimestele on täielikult või osaliselt ligipääsematu. Sellised inimesed peavad tihti lootma teistele. Näiteks pimedad saavad kasutada ühistransporti tavaliselt ainult tuttavatel marsruutidel, mille õppimiseks on vaja spetsiaalseid orienteerumiskursusi. Auto juhtimisest pole üldse mõtet rääkida. Sellistes olukordades saaksidki autonoomsed sõidukid muutuda parimaks variandiks. Ratastoolis transportimine paljude jaoks on samuti tänapäeval üsna keeruline. | Transport on selline osa meie igapäevaelust, mis erivajadustega inimestele on täielikult või osaliselt ligipääsematu. Sellised inimesed peavad tihti lootma teistele. Näiteks pimedad saavad kasutada ühistransporti tavaliselt ainult tuttavatel marsruutidel, mille õppimiseks on vaja spetsiaalseid orienteerumiskursusi. Auto juhtimisest pole üldse mõtet rääkida. Sellistes olukordades saaksidki autonoomsed sõidukid muutuda parimaks variandiks. Ratastoolis transportimine paljude jaoks on samuti tänapäeval üsna keeruline. | ||
Kuna puuded on erinevad ja iga erivajadus on individuaalne, saaksid autonoomsed sõidukid erinevates situatsioonides aidata erinevalt. Olemasolevad autonoomseid sõidukeid on võimalik kohandada erinevate puuetega inimeste jaoks, lisades neile täiendavaid tehnoloogiaid. Need on näiteks tehnoloogiad, mis võimaldavad ratastooliga inimestel sõidukisse siseneda ja sealt väljuda või mis suurendavad ligipääsetavust kuulmis- või nägemispuudega sõitjate jaoks. Ligipääsetavuse tehnoloogiad on juba olemas ja on kasutusel teistes eluvaldkondades. Tänu ekraanilugejatele saavad pimedad kasutada arvuteid ja nutitelefone. Samamoodi neil oleks võimalik ka oma sõidukitega suhelda.<ref>Ekraanilugejad, https://pimedateliit.ee/arvutid-ja-nutiseadmed/</ref> | [[File:Autonomous_vehicle.jpg|300px|thumb|right|Autonoomse sõiduki ligipääsetavus<ref>Smart Compact EV For People With Disabilities https://www.handicapreview.com/wp-content/uploads/2020/10/Equal-Smart-Compact-EV-For-People-With-Disabilities-3-889x608-1.jpg</ref>]] Kuna puuded on erinevad ja iga erivajadus on individuaalne, saaksid autonoomsed sõidukid erinevates situatsioonides aidata erinevalt. Olemasolevad autonoomseid sõidukeid on võimalik kohandada erinevate puuetega inimeste jaoks, lisades neile täiendavaid tehnoloogiaid. Need on näiteks tehnoloogiad, mis võimaldavad ratastooliga inimestel sõidukisse siseneda ja sealt väljuda või mis suurendavad ligipääsetavust kuulmis- või nägemispuudega sõitjate jaoks. Ligipääsetavuse tehnoloogiad on juba olemas ja on kasutusel teistes eluvaldkondades. Tänu ekraanilugejatele saavad pimedad kasutada arvuteid ja nutitelefone. Samamoodi neil oleks võimalik ka oma sõidukitega suhelda.<ref>Ekraanilugejad, https://pimedateliit.ee/arvutid-ja-nutiseadmed/</ref> | ||
Peamine mure on selles, et neile sobiksid ainult neljanda või viienda autonoomsuse tasemega sõidukid. Mõnedel juhtudel liikumispuudega inimestel on aga võimalus kasutada isegi madalama autonoomsuse tasemega sõidukeid, millel on käsijuhtimisseadis. Kõige raskem olukord on vaimupuuetega inimestel, sest siis inimesed vajavad jätkuvalt abilist. | Peamine mure on selles, et neile sobiksid ainult neljanda või viienda autonoomsuse tasemega sõidukid. Mõnedel juhtudel liikumispuudega inimestel on aga võimalus kasutada isegi madalama autonoomsuse tasemega sõidukeid, millel on käsijuhtimisseadis. Kõige raskem olukord on vaimupuuetega inimestel, sest siis inimesed vajavad jätkuvalt abilist. | ||
Kuigi arengutee on veel pikk, enamik takistustest võiksid olla ületatud. Piiratud liikumisvõimega inimesed planeeriksid ise oma tegevusi, osaleksid ühiskonnaelus, saaksid käia tööl ilma takistusteta ja naudiksid vabadust.<ref>Autonoomsed sõidukid abiks erivajadustega inimestele, https://www.forbes.com/sites/bradtempleton/2020/08/05/self-driving-cars-can-be-a-boon-for-those-with-disabilities/?sh=526610794017</ref> | Kuigi arengutee on veel pikk, enamik takistustest võiksid olla ületatud. Piiratud liikumisvõimega inimesed planeeriksid ise oma tegevusi, osaleksid ühiskonnaelus, saaksid käia tööl ilma takistusteta ja naudiksid vabadust.<ref>Autonoomsed sõidukid abiks erivajadustega inimestele, https://www.forbes.com/sites/bradtempleton/2020/08/05/self-driving-cars-can-be-a-boon-for-those-with-disabilities/?sh=526610794017</ref> | ||
=== Näited. Mis on praegu olemas? === | === Näited. Mis on praegu olemas? === | ||
Kuna autonoomsed sõidukid ei ole ainult isesõitvad autod, siis saame öelda, et erivajadustega inimesed juba saavad neist palju kasu. Sellised robotid on muidugi robottolmuimejad. Juba mainitud Starshipi pakirobotid aitavad neid, kellel pole võimalust iseseisvalt poodi või restorani minna. Kusjuures, see ei puuduta ainult liikumispuudega inimesi. Teenuse mobiilirakendus on ligipääsetav, st see on võimeline töötama koos ekraanilugejaga.<ref>Starship accessibility, https://www.starship.xyz/accessibility/</ref> | Kuna autonoomsed sõidukid ei ole ainult isesõitvad autod, siis saame öelda, et erivajadustega inimesed juba saavad neist palju kasu. Sellised robotid on muidugi robottolmuimejad. Juba mainitud Starshipi pakirobotid aitavad neid, kellel pole võimalust iseseisvalt poodi või restorani minna. Kusjuures, see ei puuduta ainult liikumispuudega inimesi. Teenuse mobiilirakendus on ligipääsetav, st see on võimeline töötama koos ekraanilugejaga.<ref>Starship accessibility, https://www.starship.xyz/accessibility/</ref> Isesõitvate autode valdkond on alles arenemas, puuetega inimeste seisukohast on see olukord aga eriti keeruline. Kuid ka siin on viimastel aastatel näha edusamme. Uuringud, kus testitakse autonoomsete sõidukite ligipääsetavust puuetega inimeste jaoks, on juba toimumas. | ||
Isesõitvate autode valdkond on alles arenemas, puuetega inimeste seisukohast on see olukord aga eriti keeruline. Kuid ka siin on viimastel aastatel näha edusamme. Uuringud, kus testitakse autonoomsete sõidukite ligipääsetavust puuetega inimeste jaoks, on juba toimumas. Näiteks eespool nimetatud Waymo on sellistel uuringutel juba katsetatud. On teada, et tänu hääljuhendamise funktsioonile sai pime testija Google’i autoga täiesti iseseisvalt sõita. Nüüd on võimalik pimedatel Waymo taksopargi teenust iseseisvalt kasutada. Takso tellimiseks ja sõidu kontrollimiseks loodud mobiilirakendus toetab ekraanilugejaid, nagu Androidis TalkBack ja iOS-is VoiceOver. Need rakendused pakuvad ka teeotsimisfunktsioone ja viise, kuidas sõitjad saavad paluda oma sõidukil häält teha. Waymo isejuhtivas Chrysler Pacificas võimaldavad punktkirja sildid nägemispuudega sõitjatel sõitu alustada ja rääkida operaatoriga, kes saab edasist abi osutada. Kuulmispuuetega sõitjatele on aga ligipääsetav ekraanil olev visuaalne teabe sõiduki ümber toimuva kohta. | |||
[[File:Capture-decran-2020-03-17-08.png|300px|thumb|left|Android TalkBack<ref>Using the “TalkBack” screen reader https://lestactiles.be/wp/wp-content/uploads/2020/03/Capture-d%E2%80%99%C3%A9cran-2020-03-17-%C3%A0-08.50.50.png</ref>]] Näiteks eespool nimetatud Waymo on sellistel uuringutel juba katsetatud. On teada, et tänu hääljuhendamise funktsioonile sai pime testija Google’i autoga täiesti iseseisvalt sõita. Nüüd on võimalik pimedatel Waymo taksopargi teenust iseseisvalt kasutada. Takso tellimiseks ja sõidu kontrollimiseks loodud mobiilirakendus toetab ekraanilugejaid, nagu Androidis TalkBack ja iOS-is VoiceOver. Need rakendused pakuvad ka teeotsimisfunktsioone ja viise, kuidas sõitjad saavad paluda oma sõidukil häält teha. Waymo isejuhtivas Chrysler Pacificas võimaldavad punktkirja sildid nägemispuudega sõitjatel sõitu alustada ja rääkida operaatoriga, kes saab edasist abi osutada. Kuulmispuuetega sõitjatele on aga ligipääsetav ekraanil olev visuaalne teabe sõiduki ümber toimuva kohta. | |||
Liikumispuuetega inimestele spetsiaalsete sõidukite turg on paraku päris väike. Sellised ratastoolisõidukid on näiteks Kenguru ja VW Sedric. | Liikumispuuetega inimestele spetsiaalsete sõidukite turg on paraku päris väike. Sellised ratastoolisõidukid on näiteks Kenguru ja VW Sedric. | ||
| Line 154: | Line 177: | ||
Kuigi viimastel aastatel turule tuleb rohkem erivajadusteks kohandatud tooteid, sellised standardid ei ole kohustuslikud, vaid pigem soovituslikud ettevõtete jaoks. Kohandamine ei ole paljude ettevõtete jaoks prioriteet, sest ei ole sellist kindlat seadust, mis nõuaks sõidukite kohandamist. | Kuigi viimastel aastatel turule tuleb rohkem erivajadusteks kohandatud tooteid, sellised standardid ei ole kohustuslikud, vaid pigem soovituslikud ettevõtete jaoks. Kohandamine ei ole paljude ettevõtete jaoks prioriteet, sest ei ole sellist kindlat seadust, mis nõuaks sõidukite kohandamist. | ||
[[File:Waymo-image-.png|300px|thumb|left|Waymo pimedatele<ref>Waymo for blind https://techcrunch.com/wp-content/uploads/2020/09/Waymo-image-.png</ref>]] Nagu oli varem öeldud, on Waymo One taksopargi sõidukid juba peaaegu universaalselt kohandatud. Kui teistel ettevõtetel oleks sama hea olukord, oleks rohkem võimalusi robotakso teenuseid kasutada. Praegu aga Waymo One taksoteenus on kättesaadav ainult USA mõnedes linnades ning pole teada, kas see jõuab Eestisse.<ref>Sõidukid puuetega inimestele, https://venturebeat.com/2020/08/21/autonomous-vehicles-disabilities-accessibility-inclusive-design/</ref> | [[File:Waymo-image-.png|300px|thumb|left|Waymo pimedatele<ref>Waymo for blind https://techcrunch.com/wp-content/uploads/2020/09/Waymo-image-.png</ref>]] Nagu oli varem öeldud, on Waymo One taksopargi sõidukid juba peaaegu universaalselt kohandatud. Kui teistel ettevõtetel oleks sama hea olukord, oleks rohkem võimalusi robotakso teenuseid kasutada. Praegu aga Waymo One taksoteenus on kättesaadav ainult USA mõnedes linnades ning pole teada, kas see jõuab Eestisse.<ref>Sõidukid puuetega inimestele, https://venturebeat.com/2020/08/21/autonomous-vehicles-disabilities-accessibility-inclusive-design/</ref> | ||
= Kokkuvõte = | = Kokkuvõte = | ||
Latest revision as of 19:37, 5 December 2021

Sissejuhatus
Tehnoloogia arengus on automatiseerimisel olnud alati keskne roll. Idee, et masinad võiksid midagi inimese eest ära teha, on muutumas aja jooksul pigem vajaduseks. Lisaks sellele, kuidas on masin tehniliselt konstrueeritud, on seejuures väga tähtis ka masina juhtimine. Viimasel ajal on mitmetes valdkondades seadmete juhtimist püütud arvutile üle anda ning üsna edukalt seda tehtud näiteks autonoomsete sõidukite vallas. Autonoomsed sõidukid on kiiresti kasvav trend ja üha rohkem tuleb turule uusi teenusepakkujaid, kes on mõtlemas välja uusi lahendusi. Üha enam räägitakse ka autonoomsete sõidukite kasulikkusest erivajadustega inimestele ning mis moel need võiksid igapäevatoimetustes neile abiks olla.
Antud töö eesmärgiks on tutvustada autonoomseid sõidukeid ning nendega seonduvaid erinevaid aspekte, lähtudes justnimelt erivajadustega inimeste vaatenurgast. Järgnevates peatükkides tutvustatakse autonoomsete sõidukite ajalugu, millisel arenguetapil on need praeguse seisuga ning puudutakse mõneti ka autonoomsete sõidukite tulevikuvisiooni teemat. Antakse ülevaadet kasutatavast tehnoloogiast ning tuuakse välja isejuhtivate sõidukite autonoomsuse erinevaid tasemeid. Samuti käsitletakse erinevaid kasutusalasid ning seda kuidas need erivajadustega inimeste elu lihtsustavad.
Mis on autonoomsed sõidukid ja kuidas need töötavad?

Autonoomne sõiduk on üldjoontes sõiduk, mis suudab end ise juhtida. Sellel puudub (teoorias) vajadus inimese sekkumisele. Sellised on näiteks lennukid, millel on autopiloot, Starshipi pakirobotid, juhiabidega autod jm.
Definitsiooni järgi on autonoomne sõiduk:
Autonoomne[2] - iseseisvalt toimiv, muudest tingimustest, süsteemidest sõltumatu (eesti keeles oleks praeguste tähenduste korral parem kasutada isegi ’isejuhtiv / isesõitev’)
Isejuhtiv[3] - selline, mis sõidab täisautomaatse juhtimissüsteemi abil ning ei vaja liikluses hakkamasaamiseks ja navigeerimiseks inimesest juhti
Sõiduk[4] - sõitmiseks, liiklemiseks mõeldud vahend
Kuidas autonoomsus luuakse?
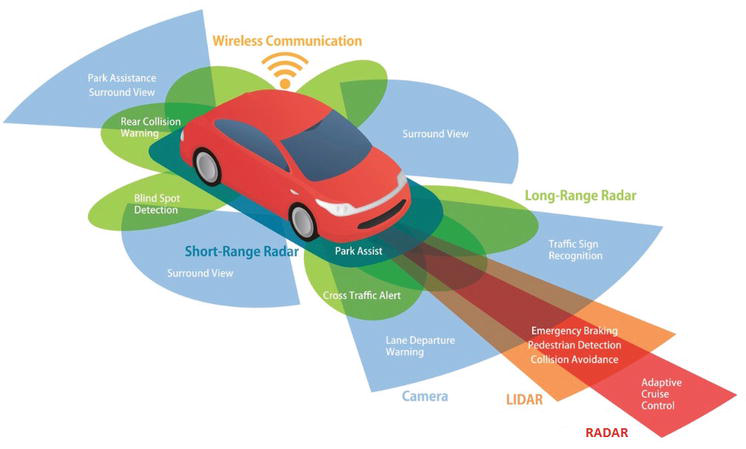
Autonoomsuse loomiseks kasutatakse erinevaid sensoreid, et koguda ümbritsevast maailmast võimalikult palju andmeid. Neid andmeid analüüsitakse pidevalt, et sõiduk oleks koguaeg väliskeskkonnaga kursis.

Seadmed, mida kasutatakse[6]:
- Lidar (LiDAR) – seade saadab välja tuhandeid infrapunakiiri ja mõõdab nende naasmisaega. Selle põhjal arvutatakse objekti kaugus seadmest. Kasutusel pigem lühidistantsidel objekti täpse kuju tuvastamiseks. Nõrkuseks on pime keskkond ja halvad ilmastikuolud.
- Radar – saadab välja raadiolaineid ning ootab nende naasmist. Lainetega saab tuvastada objektide kaugust, kiirust, nurki. Töötab pikematel distantsidel ning enamikes ilmastikutingimustes.
- Sonar – on nii aktiivset kui passiivset kasutust. Passiivne kuulab ümbruskonna hääli. Aktiivne saadab ise helilaineid välja ja ootab kaja. Kasutatakse väikestel vahemaadel suurte objektide paigutamiseks, kuna ei vaja valgust. Töötab maksimaalselt helikiirusel.
- Kaamera – kaameraid kasutatakse objektide eristamiseks. Lidari ja radariga ei ole väga lihtne eristada üht objekti teisest. Kaamerapilt käib läbi tarkvara, mis tuvastab milliseid objekte kaamera hetkel näeb. Kasutatakse liiklusmärkide, inimeste, loomade, autode, okste jms tuvastamisel ja eristamisel.
- Sisemised liikumissensorid – nt kiirendussensor, güroskoop. Auto liikumisparameetrite määramiseks.
- GPS – kasutusel muude sensorite pildi paigutamiseks pärismaailma. Ülejäänud sensorid loovad sõidukile ette lokaalse pildi, kuid see ei ole seotud sõiduki üldise asukohaga. GPSi andmete põhjal leitakse sõiduki asukoht.
Autonoomsuse kuus taset

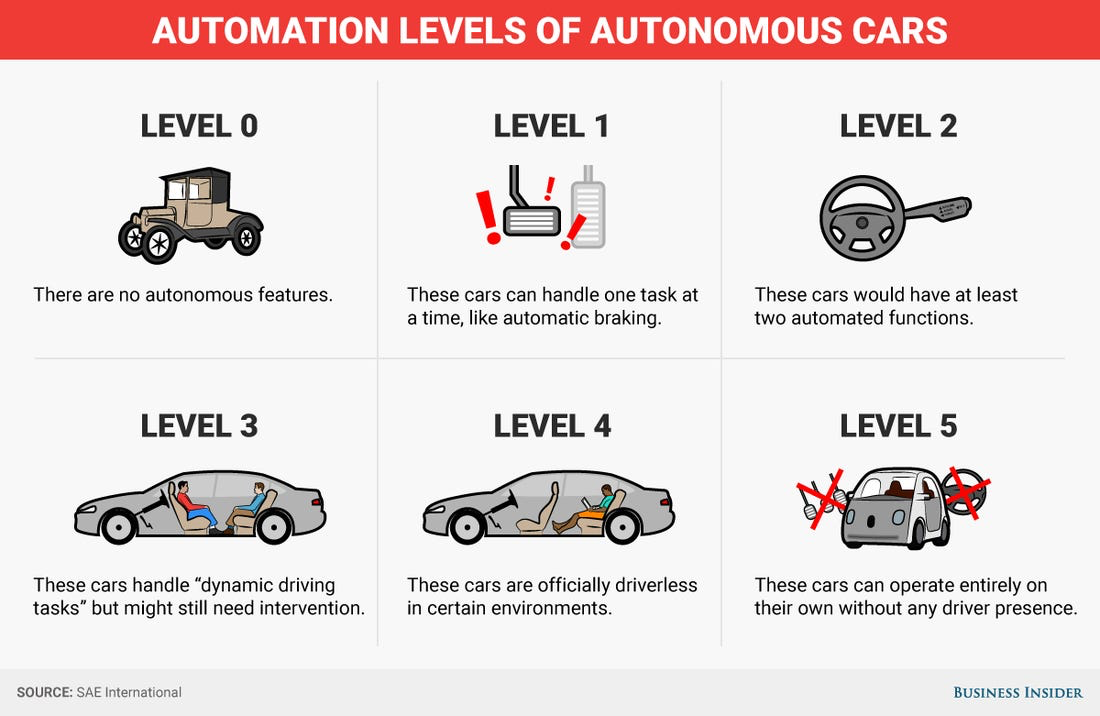
Aastal 2004 on Ameerika autotööstuse inseneride selts (SAE)[8] andnud välja dokumendi, mille järgi klassifitseeritakse autonoomsust kuueks alamtasemeks. Esimese kolme taseme puhul (0-2) peab juht ümbrust arvestama ning ise sõidukit juhtima ehk põhimõtteliselt sõidukil autonoomsus puudub. Sõiduk tasemel 3-5 suudab, kas mingil määral või täielikult ise sõita.
SAE defineerib[9] kuus erinevat taset sõiduki autonoomsuse hindamiseks:
- Tase 0 – sõidukil pole üldse kontrolli juhtimise üle, inimene juhib kõike
- Tase 1 – sõiduk suudab juhti abistada roolimise, kiirendamise ja pidurdamisega
- Tase 2 – sõiduk suudab ise sooritada kiirendamist ja pidurdamist teatud tingimustes, kuid juht peab olema kogu tähelepanuga sõitmise juures
- Tase 3 – sõiduk suudab teatud tingimustes ise sõita, kuid juht peab olema alati valmis üle võtma, kui sõiduk seda nõuab
- Tase 4 – sõiduk suudab iseseisvalt (ilma inimese järelvalveta) sõita teatud tingimustes
- Tase 5 – sõiduk suudab täiesti ise sõita
Autonoomne sõiduk ei ole ainult isesõitev auto
Tänapäeva kiired arengud sensorite ja tehisintellekti tehnoloogiates (masinõpe) on hoogu andmas autonoomsete sõidukite arengule ja võib öelda, et käimas on lausa teatav autonoomsete sõidukite revolutsioon. Areng on kiire ja see toimub peaaegu igas eluvaldkonnas.
Kõige tuntum arendatav objekt on muidugi isesõitev auto. Sellega tegelevad kõik suuremad autotööstused (Ford, Toyota, Volkswagen jt.) ja väga erinevad väiksemad ettevõtted. Neid on tänavapildis juba märgata ka - Tesla, Waymo (Google), Apollo (Baidu), Argo AI (Ford, Volkswagen). Kui nüüd vaadata suuremat pilti, siis näeme, et autonoomne sõiduk ei ole ainult isesõitev auto.
Maismaasõidukid

Kaubavedu mängib meie majanduses olulist rolli. Tehnoloogilise innovatsiooni kiirus ja e-kaubanduse kasv muudab kaupade transportimise viise. Kaubavedajad otsivad pidevalt lahendusi, kuidas transportida kaupu tõhusamalt ja ohutumalt. Tulenevalt sellest, et suurt rolli mängivad kauba transporimisel veoautod, siis on vajalik innovatsioon veoautode kategoorias. Veoautode arendusega tegelevad näiteks: Torc (Daimler/Mercedes-Benz), Aurora, TuSimple, Embark.
Linnastumine ja autode arvu kasv linnakeskkonnas on tänapäeval suur probleem, mis survestab välja mõtlema innovatsiivseid lahendusi, kuidas linnaruumi ja transpordi keskkonda muuta inimeste ja keskkonna sõbralikumaks. Innovatsioon busside tootmisel, mis parandab inimeste transportimist linnaruumis on eesmärk omaette, millega näiteks tegelevad ettevõtted: eestlaste projekt Iseauto, soomlaste projekt Sensible 4.
Põllumajanduses on kasutusel mitmed autonoomsed põllutöömasinaid, näiteks kombainid ja traktorid – näiteks ettevõte ASI Robotics tegeleb autonoomse rasketehnika välja arendamisega ja Honda tuli välja rea prototüüpidega, muu hulgas ka põllumajandusvaldkonna tehnikaga [11].
Rasketehnika kaevandustes ja metsatöödel – Volvo, ASI Robotics, John Deere, Ecorobotix.
Kaitsevaldkonnas, kus samuti kasutatakse iseliikuvaid sõidukeid, näiteks autonoomsed suurtükid, erinevad maismaasõidukid luure ja transpordi eesmärkidel, samuti eridemineerimismasinad ja pommirobotid - Milrem.
Väiksemad autonoomsed sõidukid. Näiteks ladudes on kasutusel automaatsed virnastajad, tõstukid, pakirobotid. Linnapildis on näha pakiroboteid, mis on väga autonoomne ja iseõppiv – Starship, Nuro.
Lennumasinad
Autonoomsed lennukid eesmärgiga transportida kaupu kui ka reisijaid - Merilin, Xwing, AeroVironment. The Flying Ship Company töötab välja autonoomset lennukit, mis on mõeldud lendamaks vee kohal [12]. Hiinas toodetav Ehang on keskkonnasõbralik ja intelligentne madalatel kõrgustel liikuv reisijate transportimiseks mõeldud autonoomne õhusõiduk [13].

Helikopterid - Aurora Flight Sciences (Boeing). Volocopter töötab välja lendava takso, mida saab tellida mobiiltelefoniga.
Droonid - Applied Aeronautics, Skycatch, Skydio, Orby. Türgi ettevõte STM toodab pöörleva tiivaga ründedroone KARGU, mis on loodud pakkuma maavägedele taktikalist täppislöögivõimet [15].
Veesõidukid

Teadlaste töö tulemusel loodi täielikult autonoomne tehisintellektil töötav mereuuringute laev Mayflower Autonomous Ship. Norra ettevõtete Yara ja Kongsberg koostööl valminud konteinerlaev Yara Birkeland [17]. Hollandi teadlased ehitasid isesõitva veetakso, kuhu mahub 5 inimest ja paat on täiesti autonoomne ning opereerib ööpäevaringselt [18].
Marine Advanced Robotics tegeleb autonoomsete laevade ja isejuhitavate paatide arendamisega, mida saab põhiliselt kasutada mereseireks ja andmetekogumiseks, eesmärgiga muuta valdkond turvalisemaks ja kuluefektiivsemaks, võrreldes meeskonda eeldava meetodiga. Selliseid paate saab kasutada ka sellistes olukordades, kus tavapärase suurusesega paate kasutada ei saa [19].
Autonoomsete sõidukite kasutusalad
Minevik
Peamiseks kasutusalaks transport.
Esimeseks autonoomseks sõidukiks võib lugeda da vinci „Self-Proppeled“ käru 15. sajandil [20]. Käru kasutas spiraalvedrusid ning temaga oli võimalik teekonna suunda muuta ja pidurdada. Masinal tuli kõigepealt valida soovitud suund ning piduri lahti laskmisel hakkas masin valitud suunas iseseisvalt edasi liikuma. Esimene töötav prototüüp valmis aastal 2006 Itaalias. [21]

Aastal 1933 pandi alus tänapäeva autopilootidele. Autopilooti kandis nime Mechanical Mike ning seda kasutades seati 30ndatel maailmarekord, lennates ümber maailma kaheksa päevaga. Mechanical Mike oli esimene autopiloot, mis ei kasutanud elektrit.[23]
Aastal 1945 leiutas Ralph Teetor püsikiirusehoidja. Räägitakse, et Teetor sõitis advokaadiga ja advokaat võttis rääkides hoogu maha ja kuulates kiirendas. Selline ebaühtlane sõiduviis häiris Teetori nii väga, et ta otsustas leiutada püsikiirusehoidja. Arvatavasti oli tegelikke põhjuseid rohkem. [24]
Olevik

Autonoomsed sõidukid on kasutusel pea kõikjal. Peamiselt inimeste ja kauba transportimiseks, aga ka meelelahutuse ja teaduse eesmärgil.
Erivajadustega inimeste elu võimaldavad lihtsustada pakirobotid ja ka uuemad sõiduautod. Abi pakuvad ka robottolmuimejad ja robotmuruniidukid, kui võtta neid kui autonoomseid sõidukeid.
Igapäevaelus
Uuemad sõiduautod on tihti autonoomsed. Neil on olemas mõned funktsioonid, mis on ka isesõitvatel autodel. Näiteks adaptiivne püsikiirusehoidja, sõidureahoidja ja parkimisabi süsteem [26]. Nende eelduseks on, et süsteem oskab hinnata ümbritsevat keskkonda ja tingimustele vastavalt tegutseda.
Kauba transpordiks on üpris levinud pakirobotid, Starshipi pakiroboteid võib märgata ka kesklinnas ringi liikudes. Pakirobotid suudavad kanda asju 6km raadiuses [27].
Google tütarfirma Waymo, on juba aastakümmend tegelenud isesõitva sõiduki arendamisega. Aastal 2018 avasid nad maailmas esimesena taksoteenuse, kus inimesi transpordib isesõitev auto. [28]
Aastal 2019 testiti Prantsusmaal Toulouse-Blagnac lennujaamas esimest korda autonoomset pagasit kandvat sõidukit Charlatte Autonom. Sõiduk suudab iseseisvalt liikuda ettemääratud lennuki ja lennujaama vahel. Lennuki juurde saabudes antakse kontroll üle inimesele ning peale pagasi laadimist tagastatakse kontroll sõidukile. [29]
Autopiloot on endiselt kasutuses ja on tänapäeval võimeline ka maandumise ja tõusmise teostamiseks.
Katsetusel

Reisilennukid on juba pikka aega olnud võimelised lendama ilma pardal viibiva piloodita. Sama lugu käib ka isesõitvate autode kohta. Mõlemad neist on igapäevakasutuses vaid osaliselt autonoomsena, sest vajavad turvalisuse tõttu pikaaegset katsemist.
Bussi eesmärki väljendav sõiduk on näiteks TalTechi iseAuto. Sõidukil on 4 istekohta, 2 seisukohta ning sõidab keskmiselt 10 km/h [31]. Mõne võrra võimsam taoline sõiduk on Navya Shuttle. Sõidukil on 11 istekohta, 4 seisukohta ning sõidab keskmiselt 25 km/h.[32]
Teadus
Väljapoole Maad on saadetud mitu autonoomset kulgurit, nii Kuule kui ka Marsile. Viimati saatis NASA Marsile kulguri nimega Perseverance. Sõiduk saadeti teele 2020. aasta 30. juulil ja maandus 2021. aasta 18. veebruaril. Kulguri eesmärk on koguda infot. [33]
Meelelahutus
Formula Student on peamiselt tudengitele mõeldud tootearendusvõistlus. Võistluse jaoks tuleb ehitada isejuhtiv vormel, mis peab läbima erinevad katsed võimalikult kiiresti. [34]
Tulevik
Tulevikus kindlasti suureneb autonoomsete sõidukite kasutus igapäevaelus ja selle arvelt väheneb katsetamisel olev valdkond.
Paljude visioon on, et autonoomsed sõidukid asendavad inimesi- ja/või kaupa transportivad sõidukid täielikult või vähemalt osaliselt. Antud tegevus muudaks liikluse kiiremaks ning oleks ka keskkonnasõbralikum. Lisaks peaks see olema ka ohutum, sest näiteks USA-s on liiklusõnnetuste põhjuseks 94% ajast inimviga [35].
Isesõitvad autod võimaldaksid autoga sõitmise võimalust inimestele, kellel varem selleks võimalust polnud, kehva tervise või mingi muu põhjuse tõttu. Näiteks erivajadustega inimestel tekiks võimalus kasutada isiklikku autot transpordiks. See muudaks nende elu kindlasti kergemaks, sest ei peaks toetuma ühistranspordile, selle sõiduplaanile ja marsuutidele või kulukatele taksoteenustele.
Autonoomsed sõidukid lihtsustavad erivajadustega inimeste elu
Kuidas?
Mis on erivajadus? Antud kontekstis on erivajaduse mõiste tihedalt seotud puude mõistega. ÜRO puuetega inimeste õiguste konventsiooni kohaselt hõlmab puuetega inimeste mõiste isikuid, kellel on pikaajaline füüsiline, vaimne, intellektuaalne või meeleline kahjustus, mis võib koostoimel erinevate takistustega tõkestada nende täielikku ja tõhusat osalemist ühiskonnaelus teistega võrdsetel alustel. Järelikult, puudest tingitud erivajadus on vajadus muuta ja kohandada keskkonda ja tegevusi, et tagada maksimaalsed võimalused iseseisvaks toimetulekuks.

Puuetega inimeste olukord ühiskonnas läheb viimastel aastatel paremaks, sest nad õpivad avalikult rääkima oma vajadustest, ühiskond aga õpib neid paremini aitama, neile rehabilitatsiooni võimalusi looma.[37]
Transport on selline osa meie igapäevaelust, mis erivajadustega inimestele on täielikult või osaliselt ligipääsematu. Sellised inimesed peavad tihti lootma teistele. Näiteks pimedad saavad kasutada ühistransporti tavaliselt ainult tuttavatel marsruutidel, mille õppimiseks on vaja spetsiaalseid orienteerumiskursusi. Auto juhtimisest pole üldse mõtet rääkida. Sellistes olukordades saaksidki autonoomsed sõidukid muutuda parimaks variandiks. Ratastoolis transportimine paljude jaoks on samuti tänapäeval üsna keeruline.

Kuna puuded on erinevad ja iga erivajadus on individuaalne, saaksid autonoomsed sõidukid erinevates situatsioonides aidata erinevalt. Olemasolevad autonoomseid sõidukeid on võimalik kohandada erinevate puuetega inimeste jaoks, lisades neile täiendavaid tehnoloogiaid. Need on näiteks tehnoloogiad, mis võimaldavad ratastooliga inimestel sõidukisse siseneda ja sealt väljuda või mis suurendavad ligipääsetavust kuulmis- või nägemispuudega sõitjate jaoks. Ligipääsetavuse tehnoloogiad on juba olemas ja on kasutusel teistes eluvaldkondades. Tänu ekraanilugejatele saavad pimedad kasutada arvuteid ja nutitelefone. Samamoodi neil oleks võimalik ka oma sõidukitega suhelda.[39]
Peamine mure on selles, et neile sobiksid ainult neljanda või viienda autonoomsuse tasemega sõidukid. Mõnedel juhtudel liikumispuudega inimestel on aga võimalus kasutada isegi madalama autonoomsuse tasemega sõidukeid, millel on käsijuhtimisseadis. Kõige raskem olukord on vaimupuuetega inimestel, sest siis inimesed vajavad jätkuvalt abilist.
Kuigi arengutee on veel pikk, enamik takistustest võiksid olla ületatud. Piiratud liikumisvõimega inimesed planeeriksid ise oma tegevusi, osaleksid ühiskonnaelus, saaksid käia tööl ilma takistusteta ja naudiksid vabadust.[40]
Näited. Mis on praegu olemas?
Kuna autonoomsed sõidukid ei ole ainult isesõitvad autod, siis saame öelda, et erivajadustega inimesed juba saavad neist palju kasu. Sellised robotid on muidugi robottolmuimejad. Juba mainitud Starshipi pakirobotid aitavad neid, kellel pole võimalust iseseisvalt poodi või restorani minna. Kusjuures, see ei puuduta ainult liikumispuudega inimesi. Teenuse mobiilirakendus on ligipääsetav, st see on võimeline töötama koos ekraanilugejaga.[41] Isesõitvate autode valdkond on alles arenemas, puuetega inimeste seisukohast on see olukord aga eriti keeruline. Kuid ka siin on viimastel aastatel näha edusamme. Uuringud, kus testitakse autonoomsete sõidukite ligipääsetavust puuetega inimeste jaoks, on juba toimumas.

Näiteks eespool nimetatud Waymo on sellistel uuringutel juba katsetatud. On teada, et tänu hääljuhendamise funktsioonile sai pime testija Google’i autoga täiesti iseseisvalt sõita. Nüüd on võimalik pimedatel Waymo taksopargi teenust iseseisvalt kasutada. Takso tellimiseks ja sõidu kontrollimiseks loodud mobiilirakendus toetab ekraanilugejaid, nagu Androidis TalkBack ja iOS-is VoiceOver. Need rakendused pakuvad ka teeotsimisfunktsioone ja viise, kuidas sõitjad saavad paluda oma sõidukil häält teha. Waymo isejuhtivas Chrysler Pacificas võimaldavad punktkirja sildid nägemispuudega sõitjatel sõitu alustada ja rääkida operaatoriga, kes saab edasist abi osutada. Kuulmispuuetega sõitjatele on aga ligipääsetav ekraanil olev visuaalne teabe sõiduki ümber toimuva kohta.
Liikumispuuetega inimestele spetsiaalsete sõidukite turg on paraku päris väike. Sellised ratastoolisõidukid on näiteks Kenguru ja VW Sedric.
Perspektiivid. Miks nii vähe võimalusi?
Kuigi tänapäeval räägitakse autonoomsete sõidukite revolutsioonist, eksperdid arvavad, et kõrgeima autonoomsuse tasemega sõidukid ei tule meie tänavatele isegi järgmise kümne aasta jooksul. On vähe tõenäoline, et me saame neid kasutada personaalsete sõidukitena. Põhjusi on selleks mitu: jalakäijad ja tavaliste sõidukite juhid, kelle käitumist teedel on tehisintellektil raske ennustada, tehnoloogia kõrge hind, mistõttu vähesed saavad seda endale lubada jne. Lisaks nendele on puuetega inimestel veel teised mured: ligipääsetavus, ohutus, spetsiaalsete tehnoloogiate kättesaadavus ja seadusandlus. Ligipääsetavus ja ohutus on tihedalt seotud. Näiteks ratastoolisõidukid võivad jääda allapoole vastuvõetava kasutatavuse ja ohutuse baastasemeid. Teel olevad konarused võivad põhjustada ratastooli ümberkukkumise, vigastusi ja surmajuhtumeid on põhjustanud ratastoolide valesti kinnitamine. Nägemis- ja muude puuetega reisijatel on palju väiksemad võimalused hädaolukordades sõidukitest evakueerida. Ja muidugi nägemispuudega inimene ei saa adekvaatselt reageerida liiklussituatsioonidele ega teha õigeid otsuseid.

Hindade probleem tuleneb sellest, et spetsiaalsete puuetega inimestele mõeldud sõidukite turg on päris väike, mis suurendab iga sõiduki hinda. On olemas arvamus, et üheks lahenduseks võib olla universaalse disaini loomine. See tähendab, et me ei tee eraldi sõidukeid erivajadusteks, vaid iga sõiduk sobib iga sõitja jaoks, nii erivajadusega kui ilma selleta. See on universaalse disaini paradigma.[44] Teistes valdkondades see põhimõte on ettevõtetes kasutusel, näiteks iga iPhone'i seaded sisaldavad ekraanilugejat ja teisi ligipääsetavuse tehnoloogiaid. Kuigi viimastel aastatel turule tuleb rohkem erivajadusteks kohandatud tooteid, sellised standardid ei ole kohustuslikud, vaid pigem soovituslikud ettevõtete jaoks. Kohandamine ei ole paljude ettevõtete jaoks prioriteet, sest ei ole sellist kindlat seadust, mis nõuaks sõidukite kohandamist.

Nagu oli varem öeldud, on Waymo One taksopargi sõidukid juba peaaegu universaalselt kohandatud. Kui teistel ettevõtetel oleks sama hea olukord, oleks rohkem võimalusi robotakso teenuseid kasutada. Praegu aga Waymo One taksoteenus on kättesaadav ainult USA mõnedes linnades ning pole teada, kas see jõuab Eestisse.[46]
Kokkuvõte
Autonoomsed sõidukid - olgu nendeks maismaasõidukid, lennumasinad või veesõidukid, on käesoleval 21.sajandil muutunud väga populaarseks ning kiiresti arenevaks valdkonnaks, kus on tehtud palju edusamme. Samas arengu puhul tuuakse välja ka autonoomsuse loomise keerukust. Panna isesõitev sõiduk tajuma erinevate sensorite abil ümbritsevat keskkonda, ning et masin sellest lähtuvalt veel keerulisi otsuseid langetaks, on osutunud kõigile pingutustnõudvaks väljakutseks. Selles, et autonoomsed autod on inimkonna tulevik, ollakse üpriski ühel meelel, kuid nende massilist integreerumist inimeste ellu ei saa enne lubada, kui ollakse lõpuni kindlad nende ohutuses nii tava- kui ka erivajadustega inimestele. Statistiliselt on autonoomsed autod põhjustanud oluliselt vähem liiklusõnnetusi kui inimjuhitavad autod, kuid siiski on olnud ka liiklusjuhtumeid autonoomsete sõidukite osalusel, mis on nõudnud ka inimelusid, mis omakorda tõestab, et autonoomsed sõidukid pole perfektsed.
Erivajadustega inimestel, näiteks pimedatel, on märksa raskem tajuda ümbritsevat keskkonda, mistõttu punktist A punkti B jõudmine võib osutuda parajaks väljakutseks ning mõningates olukordades selguda isegi võimatuks. Siinjuures tähtis on ära märkida, et antud valdkonnas on nii mõndagi juba ära tehtud, kuid ees on kindlasti veel palju arendustööd. Autonoomsete sõidukite kasutuselevõtmine lahendab juba praegu mitmetes valdkondades erivajadustega inimeste erinevaid vajadusi, kuid nende laialdasema leviku ning kättesaadavuseni läheb ilmselt veel aega.
Kasutatud materjal
- ↑ Starship in snow https://www.purdue.edu/newsroom/stories/2019/images/Starship%20in%20Snow.jpg
- ↑ "Autonoomne" Sõnaveebis https://sonaveeb.ee/search/unif/dlall/dsall/autonoomne/2
- ↑ "Isejuhtiv" Sõnaveebis https://sonaveeb.ee/search/unif/dlall/dsall/isejuhtiv/1
- ↑ "Sõiduk" Sõnaveebis https://sonaveeb.ee/search/unif/dlall/dsall/s%C3%B5iduk/1
- ↑ Autonomous car sensors https://api.intechopen.com/media/chapter/56860/media/F6.png
- ↑ How Self-driving Cars Work: Sensor Systems https://www.udacity.com/blog/2021/03/how-self-driving-cars-work-sensor-systems.html
- ↑ Autonoomsuse tasemed https://miro.medium.com/max/1400/1*FaHyQ7EO6qvoFPYQY5tOrg.png
- ↑ SAE Levels of Driving Automation™ Refined for Clarity and International Audience https://www.sae.org/blog/sae-j3016-update
- ↑ SAE Levels of Driving Automation https://blog.ansi.org/sae-levels-driving-automation-j-3016-2021/
- ↑ Volvo Autonomous Electric Load Carrier TA15 https://volvoceblog.com/wp-content/uploads/2021/02/Volvo-Autonomous-Electric-Load-Carrier_TA15.jpg
- ↑ Honda tests self-driving, off-road “Autonomous Work Vehicles” https://newatlas.com/honda-3e-d18-autonomous-work-vehicles/57719/
- ↑ Flying Ships https://flyingship.co/flying-ships/
- ↑ EHang AAV https://www.ehang.com/ehangaav/
- ↑ Volocopter https://mms.businesswire.com/media/20210115005057/en/852524/5/volocopter.jpg
- ↑ KARGU® Rotary Wing Attack UAV https://www.stm.com.tr/en/kargu-autonomous-tactical-multi-rotor-attack-uav
- ↑ The world's first electric and self-propelled container ship – Yara Birkeland https://cloud.brandmaster.com/fr/gallery/12632/images/lowres/202028e04b4048cda383d0e5101b0994.pngg
- ↑ Green shipping - Norway as a leading shipping nation https://www.yara.com/news-and-media/press-kits/yara-birkeland-press-kit/
- ↑ ROBOAT Self-driving technology to transform urban waterways. https://roboat.org/
- ↑ Autonomous surface vessels (ASVs) https://www.aims.gov.au/research/technology/reefscan/autonomous-surface-vessel
- ↑ A Brief History of Autonomous Vehicle Technology | WIRED https://www.wired.com/brandlab/2016/03/a-brief-history-of-autonomous-vehicle-technology/
- ↑ Self-Propelled Cart https://editions.covecollective.org/chronologies/self-propelled-cart
- ↑ Leonardo da Vinci Self Propelled Cart https://upload.wikimedia.org/wikipedia/commons/7/7a/Leonardo_da_Vinci_Self_Propelled_Cart.jpg
- ↑ Mohler, Stanley R.; Bobby H. Johnson Wiley Post, His Winnie Mae, And The World's First Pressure Suit; Smithsonian Annals Of Flight, Number 8 https://dodlithr.blogspot.com/2013/07/mechanical-mike-1930s-forefather-of.html
- ↑ The Sightless Visionary Who Invented Cruise Control https://www.smithsonianmag.com/innovation/sightless-visionary-who-invented-cruise-control-180968418/
- ↑ Robotic Package Delivery with ANYmal https://www.anybotics.com/wp-content/uploads/2019/07/ANYmal-Package-Delivery-CES-2019-1024x768.jpg
- ↑ Google'i isesõitev auto https://courses.cs.ut.ee/2015/progmaa/spring/Main/PARTIIISilmaring
- ↑ Starship https://www.starship.xyz/business/
- ↑ Waymo https://waymo.com/company/
- ↑ A world first – an autonomous baggage tractor tested in real conditions https://navya.tech/en/a-world-first-an-autonomous-baggage-tractor-tested-in-real-conditions/
- ↑ TalTechi iseAuto https://auve.tech/wp-content/uploads/2020/02/IMG_8759-2048x1365.jpg
- ↑ TalTech iseAuto v2.0 Tehniline https://iseauto.taltech.ee/tehniline/
- ↑ Self-Driving Shuttle for Passenger Transportation | Navya https://navya.tech/en/solutions/moving-people/self-driving-shuttle-for-passenger-transportation/
- ↑ NASA Mars 2020 | NASA Science https://mars.nasa.gov/mars2020/
- ↑ The Formula Student https://www.formulastudent.ee/
- ↑ Waymo https://waymo.com
- ↑ NYC Ordered to Accommodate Taxi Riders With Disabilities https://abilitymagazine.com/images/taxi-d.jpg
- ↑ Erivajaduse mõiste, https://www.tlu.ee/opmat/ts/TST7006/erivajadus_ja_sellega__seotud_misted_rekreatsioonis_ja_tegevuste_planeerimise_phialused.html
- ↑ Smart Compact EV For People With Disabilities https://www.handicapreview.com/wp-content/uploads/2020/10/Equal-Smart-Compact-EV-For-People-With-Disabilities-3-889x608-1.jpg
- ↑ Ekraanilugejad, https://pimedateliit.ee/arvutid-ja-nutiseadmed/
- ↑ Autonoomsed sõidukid abiks erivajadustega inimestele, https://www.forbes.com/sites/bradtempleton/2020/08/05/self-driving-cars-can-be-a-boon-for-those-with-disabilities/?sh=526610794017
- ↑ Starship accessibility, https://www.starship.xyz/accessibility/
- ↑ Using the “TalkBack” screen reader https://lestactiles.be/wp/wp-content/uploads/2020/03/Capture-d%E2%80%99%C3%A9cran-2020-03-17-%C3%A0-08.50.50.png
- ↑ Universal design https://www.braunability.com/us/en/blog/accessible-living/the-access-of-everything-5-way-universal-design-affects-everyone/_jcr_content/root/responsivegrid/mediacopy/backgroundImg.coreimg.jpeg/1543520881486/universal-design-1-300x193.jpeg
- ↑ Universaalne disain, https://universaldesign.ie/what-is-universal-design/definition-and-overview/
- ↑ Waymo for blind https://techcrunch.com/wp-content/uploads/2020/09/Waymo-image-.png
- ↑ Sõidukid puuetega inimestele, https://venturebeat.com/2020/08/21/autonomous-vehicles-disabilities-accessibility-inclusive-design/

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}