Isesõitvate sõidukite otsustusprotsessid liiklus- ja ohuolukordades ning sellega seotud eetilised aspektid.: Difference between revisions
| (53 intermediate revisions by 3 users not shown) | |||
| Line 1: | Line 1: | ||
=Sissejuhatus= | =Sissejuhatus= | ||
Käesolev rühmatöö käsitleb isejuhtivaid autosid ning nende ilmumist teedele ja tänavatele, mis ühtlasi sõltub seadusandlusest ning ühiskonna valmisolekust. | Käesolev rühmatöö käsitleb isejuhtivaid autosid ning nende ilmumist teedele ja tänavatele, mis ühtlasi sõltub seadusandlusest ning ühiskonna valmisolekust. | ||
Esimene peatükk käsitleb sissejuhatust koos lühiülevaatega isejuhtivate autode kohta. | |||
Käesolev rühmatöö on tulevikku vaatav, kuna käsitleb tehnoloogiad (SAE tase 4 ning 5, mida käsitleme allpool), mis on väljatöötamisel. Kuid juba on müügil sõidukid, mis on varustatud autonoomset ehk isejuhtimist võimaldavate juhiabi süsteemidega (SAE tase 2). | Käesolev rühmatöö on tulevikku vaatav, kuna käsitleb tehnoloogiad (SAE tase 4 ning 5, mida käsitleme allpool), mis on väljatöötamisel. Kuid juba on müügil sõidukid, mis on varustatud autonoomset ehk isejuhtimist võimaldavate juhiabi süsteemidega (SAE tase 2). | ||
Hetkel on tootmises mitmed isejuhtivate omadustega sõidukid: Tesla, Waymo (Google), Uber, Navya (isejuhtiv buss) jms. | Hetkel on tootmises mitmed isejuhtivate omadustega sõidukid: Tesla, Waymo (Google), Uber, Navya (isejuhtiv buss) jms. | ||
[https://en.wikipedia.org/wiki/Self-driving_car] | <ref>[https://en.wikipedia.org/wiki/Self-driving_car "https://en.wikipedia.org/wiki/Self-driving_car"]</ref> | ||
Teises peatükis on toodud isejuhtivate sõidukite autonoomsuse tasemete koha. Kolmandas peatükis on toodud isejuhtivate sõidukite tehnoloogilise arengu kohta. | |||
Neljandas peatükis on toodud isejuhtivate sõidukite sotsiaal-majanduslikud aspektid (liiklusohutus, keskkonnasäästlikkus, Mobility as a Service). | |||
Viiendas peatükis on toodud riskid ja ohud isejuhtivate sõidukite kasutusele võtmisel. | |||
Kuuendas peatükis peatume isejuhtivate sõidukite juriidilistel aspektidel. Ning seitsmendas peatükis on toodud isesõitvate sõidukite otsustusprotsessid liiklus- ja ohuolukordades. Kokkuvõte on toodud kaheksandas peatükis. | |||
=Tehnoloogia: Isejuhtivate sõidukite autonoomsuse tasemed= | =Tehnoloogia: Isejuhtivate sõidukite autonoomsuse tasemed= | ||
Isejuhtimise funktsionaalsuse väljendamiseks ja kirjeldamiseks on loodud vastav rahvusvaheline standard J3016, mille kohaselt sõidukid jagunevad nn SAE-tasemeteks 0-5. | |||
Alljärgnevalt on toodud ülevaade isejuhtivate autode tehnoloogiate autonoomsuse tasemed, mis on kirjeldatud Autoinseneride Assotsiatsiooni (Society of Automotive Engineers) poolt<ref>[https://www.sae.org/news/2019/01/sae-updates-j3016-automated-driving-graphic "SAE Standards News: J3016 automated-driving graphic update"]</ref> | |||
'''Tase 0: Autonoomsus puudub''' | |||
Nimetatud taseme hulka kuuluvad sõidukid, millel ei ole isejuhtimise võimalust. Juhil on kohustus viia läbi kõik juhtimistoimingud. Nimetatud taseme alla kuuluvad enamik meie teedel ja tänavatel sõitvatest autodest. Mõned abifunktsioonid on aga juures, n rea hoidmise häiresüsteem. | |||
'''Tase 1: Juhi abisüsteemid („hands on“)''' | |||
Nimetatud taseme alla kuuluvad süsteemid, kus on kas roolimine automatiseeritud või kiiruse hoidmine/kiirendamine automatiseeritud. Juhil tuleb jälgida sõiduki käitumist ning ohu korral tuleb juhil juhtimine üle võtta. Selle taseme üheks näiteks on adaptiivne kiirusehoidja, mis hoiab pikivahet eessõitva autoga (juht roolib, kiirus on automatiseeritud) või parkimisassistent (juht annab gaasi/pidurdab, roolimine on automatiseeritud). | |||
'''Tase 2: Osaline autonoomsus („hands off“)''' | |||
Nii sõiduki kiirus kui juhtimine on automatiseeritud. Kuigi vastutus lasub juhil, kes peab jälgima, kuidas sõiduk käitub ning vajaduse või ohuolukorra tulemusena peab juht juhtimise üle võtma. | |||
Hetkel autodel kasutusel olev näide on automaatne sõiduraja hoidja ning adaptiivne kiirusehoidja. Nimetatud tasemega süsteem suudab küllalt pikalt sõita juhi abita. Kui võrrelda teiste autotootjate süsteemidega, võimaldab Tesla „Navigate on Autopilot“ sõidurea vahetamist ning kiirteelt mahakeeramist. | |||
'''Tase 3: Tingimuslik autonoomsus („eyes off“) | |||
''' | |||
Nimetatud taseme korral on juhtimine automatiseeritud, kuid see toimib üksnes teatud piiratud olukordades. Juht ei pea aktiivselt jälgima sõiduki käitumist, kuid ta peab olemas võimeline sõiduki juhtimise üle võtma märguande/signaali peale. | |||
Siinkohal võib näitena välja tuua „ummikuassistendi“, milline süsteem saab hakkama liiklusummikus sõitmise ja edasiliikumisega, kuid kui liiklusummik lõppeb, tuleb juhil juhtimine üle võtta. 3. taseme süsteeme loetakse ohtlikuks, kuivõrd juhil võib tekkida usaldus sõiduki suhtes ning ta ei ole pärast sõiduki märguannet/signaali võimeline mõnede sekundite jooksul sõiduki juhtimist üle võtma. | |||
'''Tase 4: kõrge autonoomsus („mind off“)''' | |||
Nimetatud 4 taseme korral on juhtimine automatiseeritud, kuid piiratud olukordades, nagu näiteks konkreetses piirkonnas vms. Põhiliseks erinevuseks 3. tasemega on, et juht võib puududa. Sõiduk ei lahku temale eraldatud piirkonnast, vastava olukorra tekkimisel on sõiduk võimeline peatuma ning n kõnnitee äärde parkima. | |||
4nda taseme korral on võimalik loobuda inimesest, kes jälgib isejuhtiva sõiduki sõitmist ning kes vajadusel juhtimise üle võtab. | |||
Sõidujagamise teenuste pakkujad (Uber, Bolt jt) on huvitatud vähemalt sellise tasemega sõidukite kasutamisest, kuna see võimaldab säästa palgakulu. | |||
/.../ | '''Tase 5: täielik autonoomsus (steering wheel is optional) | ||
''' | |||
Nimetatud taseme puhul on juhtimine täiesti automatiseeritud ning sõiduk on kõikides olukordades samaväärne inimesest sõiduki juhiga. Juht ei pea sõidukis viibida ning võib tegeleda kõikide muude tegevustega. | |||
Hetkel nimetatud tasemega sõidukeid ei ole ning see nõuab sõidukile tehisintellekti olemasolu, mis peab olema samaväärne inimesega. Nimetatu eeldab sõidukilt laia spektrit teadmisi, mis väljuvad liiklusseaduses, liikluseeskirjast jm.<ref>[https://courses.cs.ut.ee/2020/Tehisintellekti_algkursus/spring/Main/PARTIVautonoomsus "Tehisintellekti_algkursus"]</ref> | |||
/.../ | Illustreerimaks eeltoodud tasemeid, lisan käesoleva illustreeriva viite: [https://www.synopsys.com/content/dam/synopsys/solutions/images/cs327718450-automotive-levels-infographic-v4.jpg.imgw.850.x.jpg "Levels of driving automation"]. | ||
Kokkuvõtteks tuleb hetkel tõdeda, et sõidukite tootjad on hetkel välja tulnud 2. autonoomsuse taseme (Tesla Autopilot, Nissani ProPilot süsteem Nissan Leaf´il) juhtimisega. Nimetatud taseme lahendused suurendavad küll sõidu turvalisust, samas on ka juhil täis vastutus. Hetkel parim näide 4nda taseme sõidukist on Google´i Wyamo projekt.<ref>[https://www.pocket-lint.com/cars/news/143955-sae-autonomous-driving-levels-explained "Self-driving cars: Autonomous driving levels explained"]</ref> | |||
=Tehnoloogia: Isejuhtivate sõidukite tehnoloogia areng= | =Tehnoloogia: Isejuhtivate sõidukite tehnoloogia areng= | ||
Esimene näide “isesõitvast” autost viib tagasi aastasse 1925, kui Ameerika autotootja Chandler demonstreeris autot, mis nähtavalt suutis ise sõita mööda tänavaid ja isegi läbi liiklusummiku. Kahjuks oli see vaid miraaž, sest tegelikult toimus selle reaalne juhtimine tagasõitvast autost üle raadiolainete, mille kaudu lülitati releede abil sisse-välja väikseid elektrimootoreid millega omakorda kontrolliti masina tegevust. Sisuliselt oli see väga suur puldiauto, aga kindlasti inimsilmale väga efektne, kuna samasugust demonstratsiooni korrati ka hiljem ja seadis suuna, kuhu poole püüeldi, mitmeteks aastakümneteks. | |||
Varieerides seda esialgset ideed üritati luua isesõitvate sõidukite süsteeme, mis toimivad sõidutee sisse integreeritud juhtimis-/kommunikatsioonikanalitelt käsklusi vastu võttes. Tol ajal kindlasti väga futuristlikud ideed, mis oleksid võinud kohe-kohe kõigile kättesaadavad olla, kahjuks katsetusfaasist kaugemale ei jõudnud. Näiteks, kuigi 1960-datel Ühendkuningriigis tehtud projekti arvutuste kohaselt tasuks see ennast ära sajandivahetuseks, samal ajal hoides ära umbes 40% õnnetustest ja suurendades teede mahutavust vähemalt 50% võrra, otsustati majanduslanguse tõttu rahastamine lõpetada 1970-date keskel. Võib arvata, et kogu põhimaanteede võrgustiku ümberehitamine näis arutu raiskamisena, samuti polnud teada kuidas selline süsteem võiks tehniliselt ajale vastu pidada: liiklustihedus on kasvanud rohkem kui 40 korda.<ref>Telegraph, [https://www.telegraph.co.uk/motoring/4750544/Cruising-into-the-future.html "Cruising into the future"]</ref> | |||
1980-datel hakkas tehnoloogia liikuma rohkem tänapäevaste lahenduste poole: Ernst Dickmanns-i<ref>Wikipedia, [https://en.wikipedia.org/wiki/Ernst_Dickmanns "Ernst Dickmanns"]</ref> juhtimisel töötati välja esimene kaamerapõhine isesõitev süsteem. Kasutades kaameraid, erinevaid sensoreid, nutikaid optimiseeringuid, Kalmani (ja muid sarnaseid) filtreid ja paralleelarvuteid<ref>[http://people.idsia.ch/~juergen/robotcars.html "Prof. Schmidhuber's highlights of robot car history"]</ref>, suudeti, seda küll tühjal ja veel avamata, kiirteelõigul sõita 90km/h teemärgiste järgi.<ref>Politico, [https://www.politico.eu/article/delf-driving-car-born-1986-ernst-dickmanns-mercedes/ "The man who invented the self-driving car"]</ref> 1994-dal aastal suutis Dickmanns-i süsteem sõita maha tuhandekilomeetrise teekonna mööda kolmerealist kiirteed kiirusega kuni 130km/h, vaid vähese inimsekkumisega ja seejuures autoomatselt vahetades ridu, tehes möödasõite, ning hoides ohutut pikivahet.<ref>[https://media.daimler.com/marsMediaSite/en/instance/ko/The-PROMETHEUS-project-launched-in-1986-Pioneering-autonomous-driving.xhtml?oid=13744534 "PROMETHEUS Project"]</ref> Sellest projektist kasvasid välja mitmed tänapäevalgi kasutusel olevad tehnoloogiad, näiteks adaptiivne püsikiirusehoidja<ref>[https://en.wikipedia.org/wiki/Adaptive_cruise_control "Adaptive cruise control"]</ref> ja sõidukitevaheline “pilve” infosüsteem,<ref>[https://en.wikipedia.org/wiki/Vehicle-to-everything "Vehicle-to-X"]</ref> mis on ka ühed olulised komponendid tänapäevaste autonoomsete sõidukite juures. | |||
2000-datel sai valdkond kõvasti hoogu juurde USA kaitsetööstuse arendusagentuuri DARPA isejuhtivate sõidukite võistlusest, kus oli ülesandeks läbida etteantud (takistus) rada autonoomselt. Nende tulemusena sai populaarseks Simultaneous localization and mapping (SLAM<ref>[https://en.wikipedia.org/wiki/Simultaneous_localization_and_mapping "SLAM"]</ref>), mille põhimõte on koostada või uuendada kaarti oma ümbrusest ja samal ajal hoida järge enda positsioonil. SLAM algoritme on palju ja erinevaid, sobitatud vastavalt olemasolevatele sensoritele või võimalustele. Tänapäeval kõige levinum näide sellest on robot tolmuimejad.<ref>[https://www.technologyreview.com/2015/09/16/247936/the-roomba-now-sees-and-maps-a-home/ "https://www.technologyreview.com/2015/09/16/247936/the-roomba-now-sees-and-maps-a-home/"]</ref> Aastal 2009 hakkas Google salaja arendama enda isejuhtivat sõidukit, mille esimene variant oli modifitseeritud Toyota Prius, millele pandi külge laserskaneerimisseade (Lidar), neli radarit, kaamera ja hunnik muid sensoreid.<ref>[https://spectrum.ieee.org/automaton/robotics/artificial-intelligence/how-google-self-driving-car-works "How Google self-driving car works"]</ref> Kuigi kõik suuremad autotootjad olid selle kallal juba mitmeid aastaid vaeva näinud, läbis Google-i masin esimesena autonoomsetele sõidukitele mõeldud “sõidueksami”, seda küll pisikeste mööndustega. Nimelt seati piirangud ilmastiku- ja teeoludele, ning marsruut valiti selline et ei läbitaks ringteid, koolialasid ega foorita raudteid. Kaasas olnud operaatorid pidid küll kaks korda juhtimise üle võtma, kuid test sai läbitud edukalt esimese korraga. Demonstreeritud sai väga suurt ettevaatlikkust ja ohutuid sõidumanöövreid, eriti ülekäiguradadel, ning oskust ennustada inimese jaoks ootamatuid olukordi.<ref>[https://spectrum.ieee.org/transportation/advanced-cars/how-googles-autonomous-car-passed-the-first-us-state-selfdriving-test "https://spectrum.ieee.org/transportation/advanced-cars/how-googles-autonomous-car-passed-the-first-us-state-selfdriving-test"]</ref> | |||
= | 2014 aastal avalikustas Tesla oma autopiloodi tarkvara, mis suudab paljusid sõidumanöövreid autonoomselt teha, kuid siiski SAE 2. tasemel. Erinevalt Google-i tehnoloogiast, ei kasuta Tesla Lidarit<ref>[https://www.theverge.com/2019/4/24/18512580/elon-musk-tesla-driverless-cars-lidar-simulation-waymo "https://www.theverge.com/2019/4/24/18512580/elon-musk-tesla-driverless-cars-lidar-simulation-waymo"]</ref>, vaid üritab kogu kaardistamise ära teha erinevate kaameratega, radari ja sonaritega, mis muudab asja kõvasti taskukohasemaks ja ehituselt lihtsamaks. Tesla väidab et nende masinad on valmis 5. taseme autonoomsuseks, kuid see on saanud kõvasti vastukaja just Lidari puudumise tõttu.<ref>[https://www.mercurynews.com/2019/06/17/elon-musk-calls-lidar-stupid-but-most-self-driving-cars-use-it-whos-right/ "https://www.mercurynews.com/2019/06/17/elon-musk-calls-lidar-stupid-but-most-self-driving-cars-use-it-whos-right/"]</ref> Tänapäevane isejuhtiv sõiduk koosnebki peamiselt lidaritest, nii lühi- kui ka kaugmaa radaritest ja kaameratest, ning mõningatel juhtudel ka sonaritest.<ref>[https://blog.waymo.com/2020/03/introducing-5th-generation-waymo-driver.html "Introducing 5th generation Waymo Driver"]</ref> Hetkel on kõige kõrgemad olemasolevad, 4. taseme, isejuhtivad sõidukid näiteks Waymo-l (Google tütarettevõte), kes pakub nendega avalikku juhivaba taksoteenust.<ref>[https://www.engadget.com/2018-12-05-waymo-one-launches.html "Waymo One launches."]</ref> Kõige kõrgema, 5. taseme isejuhtivad sõidukid tänasel päeval puuduvad. | ||
=Isejuhtivate sõidukite sotsiaal-majanduslikud aspektid= | |||
==Liiklusohutus== | ==Liiklusohutus== | ||
Liiklusohutuse suurenemist võib võtta ise juhtivate sõidukite massilise kasutuselevõtuga kaasnema positiivse paratamatusena. Võttes ette fakti, et 94% ränkadest õnnetusjuhtumitest on põhjustatud inimese veast,<ref>[https://www.nhtsa.gov/technology-innovation/automated-vehicles-safety "Automated vehicles for safety"]</ref> olgu selleks siis juhtimisviga (vale sõidukiirus libedal teel) või otsustusveast (joobes juhtimine), siis ainuüksi selle komponendi elimineerimine tooks väga suure muutuse surmade ja vigastuste arvus. Näiteks põhjus miks Google oma esimest isejuhtivat autot ringteedele ei lubanud, ei olnud mitte selles et nad poleks seal hakkama saanud, vaid inimesed ise ei tea õigeid reegleid. Võiks arvata, et kui liikluses oleksid ainult autonoomsed sõidukid, oleks liiklusõnnetuste arv nullilähedane. Ideaalis on masin suuteline kõvasti enamaks kui inimene: ta ei väsi, näeb ja tajub mitmes suunas samaaegselt ning erinevatel füüsilistel kihtidel, suudab protsessida kiiremini ja tegeleb ainult oma põhiülesandega, ning masinad saavad omavahel jooksvalt infot vahetada. | |||
Kuid reaalsuses pole need kõikvõimsad – õnnetusi juhtub ka nendegagi. Eelkõige käivad isesõitvate autode poolt põhjustatud juhtumitest läbi just 2. taseme autopilootide õnnetused, kust võib leida märke inimese hooletusest, kuna sealne isejuhtimissüsteem on kõigest juhiabi, ehk juht peab siiski keskenduma sõitmisele ja olema valmis kontrolli haarama kui situatsioon seda nõuab, mitte tegelema kõrvaliste asjadega., näiteks mängima telefoniga.<ref>[https://www.bbc.com/news/technology-51645566 "https://www.bbc.com/news/technology-51645566"]</ref> Teiselt poolt, kus kannatajapooleks on isejuhtiv masin ja selle reisijaskond, on uskumatult palju tagant sisse sõitmisi, mis annab jällegi tunnustust faktile, et inimesed ise ei suuda ohutusnõudeid järgida. | |||
Aga on ka “arvuti” poolt põhjustatud õnnetusi, mõned isegi väga rängad. Kuna “pildi” loomine sõitmiseks käib neil tõenäosuslike mudelite põhjal, on leitud väga väikesi ja lihtsaid viise, kuidas vigu tekitada. Näiteks kleebised tuvastatavatel objektidel võivad süsteemi lolliks ajada ja valesti käituma panna. Või kui kasutusel on ainult ühte tüüpi sensorid ei pruugi neile alati sobivad tingimused olla. Siin tulevad mängu metoodikad, kus paljude erinevate sensorite väljundite põimimisel üheks saab otsuseid kindlamini vastu võtta. Isegi kui praegu ollakse täisautonoomsusest päris kaugel, on kasutusele võetud tükke tervikust lahendusest, mis muudavad ka iseseisvalt liiklemist ohutumaks. Nende alla saab lugeda igasugused juhiabisüsteemid, näiteks adaptiivne püsikiiruse hoidja, pimenurga kontroll, kokkupõrke ennetussüsteemid jne, mis on tee leidnud juba olemasolevatesse sõidukitesse. | |||
==Keskkonnasäästlikkus== | ==Keskkonnasäästlikkus== | ||
Majandus- ja Kommunikatsiooniministeeriumi liiklusohutusprogramm aastateks 2016-2025 paneb rõhku ka keskkonnasäästlikkusele.<br> | Majandus- ja Kommunikatsiooniministeeriumi liiklusohutusprogramm aastateks 2016-2025 paneb rõhku ka keskkonnasäästlikkusele.<br> | ||
Liiklusohutuse eesmärkide saavutamiseks keskendutakse kolmele peamisele liiklusohutust mõjutavale valdkonnale. Valdkond „Vastutustundlik ja ohte tajuv liikleja“ keskendub kõigi liikluses osalejate ohutust väärtustavate hoiakute ja alalhoidliku liikluskäitumise kujundamisele. Valdkond „Ohutu keskkond“ hõlmab ohutumat ja tõhusamat liikuvust, mis on sotsiaalselt vastuvõetav ja keskkonnasäästlik ning erinevate aastaaegade liikluseripärasid arvestav. Valdkond „Ohutu sõiduk“ näeb ette ohutumate sõidukite kasutamise liikluses.<br> | Liiklusohutuse eesmärkide saavutamiseks keskendutakse kolmele peamisele liiklusohutust mõjutavale valdkonnale. Valdkond „Vastutustundlik ja ohte tajuv liikleja“ keskendub kõigi liikluses osalejate ohutust väärtustavate hoiakute ja alalhoidliku liikluskäitumise kujundamisele. Valdkond „Ohutu keskkond“ hõlmab ohutumat ja tõhusamat liikuvust, mis on sotsiaalselt vastuvõetav ja keskkonnasäästlik ning erinevate aastaaegade liikluseripärasid arvestav. Valdkond „Ohutu sõiduk“ näeb ette ohutumate sõidukite kasutamise liikluses.<br> | ||
| Line 58: | Line 91: | ||
==Mobility as a Service (MaaS)== | ==Mobility as a Service (MaaS)== | ||
Mobiilsus Teenusena/ Mobility-as-a-Service (MaaS) kirjeldab transpordi teenust, kus inimesel ei pea olema isiklikku sõiduvahendit vaid see teenus hõlmab nii avalikke kui ka erasektori transporditeenuseid. Reisi planeerimisel saab kasutaja valida odavuse, kiiruse või mugavuse järgi endale sobiva transpordiviisi.<ref>Wikipedia, [https://en.wikipedia.org/wiki/Mobility_as_a_service]</ref> | Mobiilsus Teenusena/ Mobility-as-a-Service (MaaS) kirjeldab transpordi teenust, kus inimesel ei pea olema isiklikku sõiduvahendit vaid see teenus hõlmab nii avalikke kui ka erasektori transporditeenuseid. Reisi planeerimisel saab kasutaja valida odavuse, kiiruse või mugavuse järgi endale sobiva transpordiviisi.<ref>Wikipedia, [https://en.wikipedia.org/wiki/Mobility_as_a_service]</ref> | ||
<br> | <br> | ||
| Line 76: | Line 108: | ||
<ref>[https://www2.deloitte.com/content/dam/Deloitte/nl/Documents/consumer-business/deloitte-nl-cb-ths-rise-of-mobility-as-a-service.pdf]</ref> | <ref>[https://www2.deloitte.com/content/dam/Deloitte/nl/Documents/consumer-business/deloitte-nl-cb-ths-rise-of-mobility-as-a-service.pdf]</ref> | ||
=Riskid ja ohud | =Riskid ja ohud isejuhtivate sõidukite kasutusele võtmisel= | ||
'''Turvastandardite puudumine'''<br> | '''Turvastandardite puudumine'''<br> | ||
Isesõitvate autode puhul on tegu viimase kümnendi reguleerimata tööstusega - erinevad autotootjad alles alustavad selles valdkonnas ning turvanõuded on seega välja töötamata. Võistlus erinevate tootjate vahel on üles kuumenemas ning kasutatud tehnoloogia olemus ei ole täielikult läbipaistev. Autonoomsed lisad rakendatakse kui juhtimisabina, ent auto sõidab hoolimata sellest kas juht hoiab käsi roolil või mitte. Teiste sõnadega toimub eksperimenteerimine inimeste peal, et täiustada autode autonoomset võimekust. Enamus liiklusõnnetuste juhtumitest üritatakse põhjendada inimeksimusega<ref>ScienceDaily, [https://www.sciencedaily.com/releases/2019/10/191028164405.htm "Public blame accidents on drivers more than their automated cars when both make mistakes"], October 28, 2019</ref> ning kuna surmaga lõppevate juhtumite arv on siiski madal, siis ei ole poliitilised võimud antud tööstusele põhjalikku tähelepanu veel pööranud.<br> | Isesõitvate autode puhul on tegu viimase kümnendi reguleerimata tööstusega - erinevad autotootjad alles alustavad selles valdkonnas ning turvanõuded on seega välja töötamata. Võistlus erinevate tootjate vahel on üles kuumenemas ning kasutatud tehnoloogia olemus ei ole täielikult läbipaistev. Autonoomsed lisad rakendatakse kui juhtimisabina, ent auto sõidab hoolimata sellest kas juht hoiab käsi roolil või mitte. Teiste sõnadega toimub eksperimenteerimine inimeste peal, et täiustada autode autonoomset võimekust. Enamus liiklusõnnetuste juhtumitest üritatakse põhjendada inimeksimusega<ref>ScienceDaily, [https://www.sciencedaily.com/releases/2019/10/191028164405.htm "Public blame accidents on drivers more than their automated cars when both make mistakes"], October 28, 2019</ref> ning kuna surmaga lõppevate juhtumite arv on siiski madal, siis ei ole poliitilised võimud antud tööstusele põhjalikku tähelepanu veel pööranud.<br> | ||
| Line 98: | Line 128: | ||
=Autonoomsete sõidukite juriidilised aspektid= | =Autonoomsete sõidukite juriidilised aspektid= | ||
Autonoomsete sõidukite juriidilised aspektid on tänapäeval äärmiselt aktuaalne valdkond, mis vajab kaardistust ja reguleerimist. Õiguspoliitiliselt võib temaatikale olla erinevaid lähenemisi, kuid teaduslikud uuringud on kindlalt ühel meelel – esile kerkivad tehnoloogiad muudavad ühiskonna ilmet. | Autonoomsete sõidukite juriidilised aspektid on tänapäeval äärmiselt aktuaalne valdkond, mis vajab kaardistust ja reguleerimist. Õiguspoliitiliselt võib temaatikale olla erinevaid lähenemisi, kuid teaduslikud uuringud on kindlalt ühel meelel – esile kerkivad tehnoloogiad muudavad ühiskonna ilmet. | ||
Kui igas kodus ja ettevõttes saab olema autonoomne robot, mõjutab see ühiskonda oluliselt, sest inimesed hakkavad töötama ja elama koos ja koostöös keerulise tehnoloogiaga. Seega lisaks isejuhtivate sõidukite reguleerimise võimalustele ja vajadustele on küsimus laiem, sest isejuhtivus ei ole omane ainult SAE 4 ja 5 sõidukile, vaid ka muule intelligentsele tehnoloogiale. | Kui igas kodus ja ettevõttes saab olema autonoomne robot, mõjutab see ühiskonda oluliselt, sest inimesed hakkavad töötama ja elama koos ja koostöös keerulise tehnoloogiaga. Seega lisaks isejuhtivate sõidukite reguleerimise võimalustele ja vajadustele on küsimus laiem, sest isejuhtivus ei ole omane ainult SAE 4 ja 5 sõidukile, vaid ka muule intelligentsele tehnoloogiale. | ||
| Line 143: | Line 172: | ||
<ref>[http://www.europarl.europa.eu/committees/fr/supporting-analysessearch.html Nathalie Nevejans, Study on European Civil Law Rules in Robotics, PE 571.379, Euroopa Liit, 2016. ]</ref> | <ref>[http://www.europarl.europa.eu/committees/fr/supporting-analysessearch.html Nathalie Nevejans, Study on European Civil Law Rules in Robotics, PE 571.379, Euroopa Liit, 2016. ]</ref> | ||
= | =Isejuhtivate sõidukite otsustusprotsessid liiklus- ja ohuolukordades= | ||
Et sõita inimesest paremini on isesõitvad masinad varustatud erinevate kaamera, GPS, ultraheli, radari ja kallimate lidari sensoritega, mis annavad parema taju sellest, mis liikluses toimub, kui inimesel seda endal on. Enamus autodest juba kasutavad erinevaid kaameraid ja radareid juhi- ja parkimisabi näol ning tagavad isegi madalamad autonoomsuse tasemed. Täisautonoomsuse tarbeks on aga lidarid, mis kiirete nähtamatute laserisignaalide abil moodustavad punktipilved ümbruskonda jäljendavas kolmemõõtmelises ruumis. Kõikide nende sensorite sisendandmed saadetakse tehisintellekti keskprotessorile kombineerimiseks ja töötlemiseks, millega saadakse 360-kraadine ülevaade, mis sõiduki ümber toimub. Selles ülevaates tehakse kindlaks näiteks erinevad tehis- ja inimobjektid, nende distants ja kaugus. Nende andmete põhjal tagatakse ka rajavahetuse otsuse ohutus sarnaselt nagu pimenurga hoiatusandur tavalistes sõiduautodes. | Et sõita inimesest paremini on isesõitvad masinad varustatud erinevate kaamera, GPS, ultraheli, radari ja kallimate lidari sensoritega, mis annavad parema taju sellest, mis liikluses toimub, kui inimesel seda endal on. Enamus autodest juba kasutavad erinevaid kaameraid ja radareid juhi- ja parkimisabi näol ning tagavad isegi madalamad autonoomsuse tasemed. Täisautonoomsuse tarbeks on aga lidarid, mis kiirete nähtamatute laserisignaalide abil moodustavad punktipilved ümbruskonda jäljendavas kolmemõõtmelises ruumis. Kõikide nende sensorite sisendandmed saadetakse tehisintellekti keskprotessorile kombineerimiseks ja töötlemiseks, millega saadakse 360-kraadine ülevaade, mis sõiduki ümber toimub. Selles ülevaates tehakse kindlaks näiteks erinevad tehis- ja inimobjektid, nende distants ja kaugus. Nende andmete põhjal tagatakse ka rajavahetuse otsuse ohutus sarnaselt nagu pimenurga hoiatusandur tavalistes sõiduautodes. | ||
| Line 157: | Line 184: | ||
=Kokkuvõte= | =Kokkuvõte= | ||
Isejuhtivad autod on suurepärane proovikivi tehisintellekti jaoks - kuigi varasemalt on arvuti alistanud maailmameistri inimmõistuse jaoks keerukates lauamängudes nagu male ja Go, osutusid need masinmõistuse jaoks suhteliselt lihtsaks ja jõumeetodil lahendatavaks. Vaja oli lihtsalt piisavalt kiiret arvutit, et kõik käiguvariandid läbi vaadata. Samal ajal autosõit, mis enamike inimeste jaoks on õpitav, on osutunud arvuti jaoks üle mõistuse keeruliseks. | Isejuhtivad autod on suurepärane proovikivi tehisintellekti jaoks - kuigi varasemalt on arvuti alistanud maailmameistri inimmõistuse jaoks keerukates lauamängudes nagu male ja Go, osutusid need masinmõistuse jaoks suhteliselt lihtsaks ja jõumeetodil lahendatavaks. Vaja oli lihtsalt piisavalt kiiret arvutit, et kõik käiguvariandid läbi vaadata. Samal ajal autosõit, mis enamike inimeste jaoks on õpitav, on osutunud arvuti jaoks üle mõistuse keeruliseks. | ||
| Line 170: | Line 196: | ||
https://courses.cs.ut.ee/2020/Tehisintellekti_algkursus/spring/Main/PARTIVise?fbclid=IwAR1L4XxLfMHNAuuS16e8WS6_gpLbahrJsfq5tImzAx59mKzSAgjCgMM55wo]</ref><br> | https://courses.cs.ut.ee/2020/Tehisintellekti_algkursus/spring/Main/PARTIVise?fbclid=IwAR1L4XxLfMHNAuuS16e8WS6_gpLbahrJsfq5tImzAx59mKzSAgjCgMM55wo]</ref><br> | ||
Eksperdid on eriarvamusel, millises ajahorisondis jõuavad isejuhtimise tehnoloogiad laialdasse kasutusse. Kindel on see, et alustatakse lihtsamatest ülesannetest nagu näiteks pakivedu. Siin ongi üheks eestvedajaks Eesti oma idufirma Starship Technologies.<br> | Eksperdid on eriarvamusel, millises ajahorisondis jõuavad isejuhtimise tehnoloogiad laialdasse kasutusse. Kindel on see, et alustatakse lihtsamatest ülesannetest nagu näiteks pakivedu. Siin ongi üheks eestvedajaks Eesti oma idufirma Starship Technologies.<br> | ||
Isejuhtivate taksode vastu tunneb huvi Eesti idufirma Bolt. Siinkohal olgu ära toodud robootikaeksperdi Rodney Brooksi 2018. aasta jaanuaris tehtud ennustused isejuhtivate taksode kasutuselevõtu osas | Isejuhtivate taksode vastu tunneb huvi Eesti idufirma Bolt. Siinkohal olgu ära toodud robootikaeksperdi Rodney Brooksi 2018. aasta jaanuaris tehtud ennustused isejuhtivate taksode kasutuselevõtu osas. Igal aastal vaatab ta need ennustused üle ja märgib millised on täitunud ja millised mitte.<ref>[https://courses.cs.ut.ee/2020/Tehisintellekti_algkursus/spring/Main/PARTIVtest]</ref><br> | ||
{| class="wikitable" style="text-align: left;" | |||
|- | |||
! style="width:20em;" |Rodney Brooksi ennustus | |||
! style="width:20em;" |Varaseim aeg | |||
|- | |||
|Esimene juhita taksoteenus ühes Ameerika Ühendriikide suurlinnas, millel on fikseeritud pealetuleku ja mahamineku kohad ning piirangud ilmastikutingimustele ja töötamise ajale. Sisuliselt on tegemist juhita marsruuttaksodega. | |||
|2022 | |||
|- | |||
|Samasugune taksoteenus 10 Ameerika Ühendriikide suurlinnas. Piiranguvälistel aegadel kasutatakse autot koos juhiga (sensorid muutuvad nii palju odavamaks, et sama autot on mõtet kasutada koos juhiga). | |||
|2025 | |||
|- | |||
|Selline taksoteenus on 50 või 100 suuremas Ameerika Ühendriikide linnas. | |||
|2028 | |||
|- | |||
|Juhita taksoteenus suuremas Ameerika Ühendriikide linnas, nii et peatumiskohad pole piiratud. Ala võib olla piiratud. | |||
|2032 | |||
|- | |||
|} | |||
=Kasutatud materjalid= | =Kasutatud materjalid= | ||
<references /> | <references /> | ||
'''Muud allikad'''<br> | |||
* http://moralmachine.mit.edu/ <br> | |||
* https://www.nature.com/articles/d41586-018-07135-0 <br> | |||
* https://www.theverge.com/2018/10/24/18013392/self-driving-car-ethics-dilemma-mit-study-moral-machine-results <br> | |||
* https://www.roboticsbusinessreview.com/unmanned/unmanned-ground/infographic-can-self-driving-cars-make-moral-decisions/ <br> | |||
* https://phys.org/news/2019-01-self-driving-cars-moral.html <br> | |||
* https://www.newyorker.com/science/elements/a-study-on-driverless-car-ethics-offers-a-troubling-look-into-our-values <br> | |||
* https://www.nvidia.com/en-us/self-driving-cars/drive-labs/ <br> | |||
* https://www.sciencedirect.com/science/article/pii/S0968090X15003447 <br> | |||
* https://en.wikipedia.org/wiki/Self-driving_car <br> | |||
* https://www.pocket-lint.com/cars/news/143955-sae-autonomous-driving-levels-explained <br> | |||
* https://www.synopsys.com/automotive/autonomous-driving-levels.html <br> | |||
* https://en.wikipedia.org/wiki/History_of_self-driving_cars <br> | |||
Latest revision as of 09:12, 8 May 2020
Sissejuhatus
Käesolev rühmatöö käsitleb isejuhtivaid autosid ning nende ilmumist teedele ja tänavatele, mis ühtlasi sõltub seadusandlusest ning ühiskonna valmisolekust.
Esimene peatükk käsitleb sissejuhatust koos lühiülevaatega isejuhtivate autode kohta.
Käesolev rühmatöö on tulevikku vaatav, kuna käsitleb tehnoloogiad (SAE tase 4 ning 5, mida käsitleme allpool), mis on väljatöötamisel. Kuid juba on müügil sõidukid, mis on varustatud autonoomset ehk isejuhtimist võimaldavate juhiabi süsteemidega (SAE tase 2).
Hetkel on tootmises mitmed isejuhtivate omadustega sõidukid: Tesla, Waymo (Google), Uber, Navya (isejuhtiv buss) jms. [1]
Teises peatükis on toodud isejuhtivate sõidukite autonoomsuse tasemete koha. Kolmandas peatükis on toodud isejuhtivate sõidukite tehnoloogilise arengu kohta.
Neljandas peatükis on toodud isejuhtivate sõidukite sotsiaal-majanduslikud aspektid (liiklusohutus, keskkonnasäästlikkus, Mobility as a Service).
Viiendas peatükis on toodud riskid ja ohud isejuhtivate sõidukite kasutusele võtmisel.
Kuuendas peatükis peatume isejuhtivate sõidukite juriidilistel aspektidel. Ning seitsmendas peatükis on toodud isesõitvate sõidukite otsustusprotsessid liiklus- ja ohuolukordades. Kokkuvõte on toodud kaheksandas peatükis.
Tehnoloogia: Isejuhtivate sõidukite autonoomsuse tasemed
Isejuhtimise funktsionaalsuse väljendamiseks ja kirjeldamiseks on loodud vastav rahvusvaheline standard J3016, mille kohaselt sõidukid jagunevad nn SAE-tasemeteks 0-5. Alljärgnevalt on toodud ülevaade isejuhtivate autode tehnoloogiate autonoomsuse tasemed, mis on kirjeldatud Autoinseneride Assotsiatsiooni (Society of Automotive Engineers) poolt[2]
Tase 0: Autonoomsus puudub
Nimetatud taseme hulka kuuluvad sõidukid, millel ei ole isejuhtimise võimalust. Juhil on kohustus viia läbi kõik juhtimistoimingud. Nimetatud taseme alla kuuluvad enamik meie teedel ja tänavatel sõitvatest autodest. Mõned abifunktsioonid on aga juures, n rea hoidmise häiresüsteem.
Tase 1: Juhi abisüsteemid („hands on“)
Nimetatud taseme alla kuuluvad süsteemid, kus on kas roolimine automatiseeritud või kiiruse hoidmine/kiirendamine automatiseeritud. Juhil tuleb jälgida sõiduki käitumist ning ohu korral tuleb juhil juhtimine üle võtta. Selle taseme üheks näiteks on adaptiivne kiirusehoidja, mis hoiab pikivahet eessõitva autoga (juht roolib, kiirus on automatiseeritud) või parkimisassistent (juht annab gaasi/pidurdab, roolimine on automatiseeritud).
Tase 2: Osaline autonoomsus („hands off“)
Nii sõiduki kiirus kui juhtimine on automatiseeritud. Kuigi vastutus lasub juhil, kes peab jälgima, kuidas sõiduk käitub ning vajaduse või ohuolukorra tulemusena peab juht juhtimise üle võtma. Hetkel autodel kasutusel olev näide on automaatne sõiduraja hoidja ning adaptiivne kiirusehoidja. Nimetatud tasemega süsteem suudab küllalt pikalt sõita juhi abita. Kui võrrelda teiste autotootjate süsteemidega, võimaldab Tesla „Navigate on Autopilot“ sõidurea vahetamist ning kiirteelt mahakeeramist.
Tase 3: Tingimuslik autonoomsus („eyes off“) Nimetatud taseme korral on juhtimine automatiseeritud, kuid see toimib üksnes teatud piiratud olukordades. Juht ei pea aktiivselt jälgima sõiduki käitumist, kuid ta peab olemas võimeline sõiduki juhtimise üle võtma märguande/signaali peale.
Siinkohal võib näitena välja tuua „ummikuassistendi“, milline süsteem saab hakkama liiklusummikus sõitmise ja edasiliikumisega, kuid kui liiklusummik lõppeb, tuleb juhil juhtimine üle võtta. 3. taseme süsteeme loetakse ohtlikuks, kuivõrd juhil võib tekkida usaldus sõiduki suhtes ning ta ei ole pärast sõiduki märguannet/signaali võimeline mõnede sekundite jooksul sõiduki juhtimist üle võtma.
Tase 4: kõrge autonoomsus („mind off“)
Nimetatud 4 taseme korral on juhtimine automatiseeritud, kuid piiratud olukordades, nagu näiteks konkreetses piirkonnas vms. Põhiliseks erinevuseks 3. tasemega on, et juht võib puududa. Sõiduk ei lahku temale eraldatud piirkonnast, vastava olukorra tekkimisel on sõiduk võimeline peatuma ning n kõnnitee äärde parkima.
4nda taseme korral on võimalik loobuda inimesest, kes jälgib isejuhtiva sõiduki sõitmist ning kes vajadusel juhtimise üle võtab.
Sõidujagamise teenuste pakkujad (Uber, Bolt jt) on huvitatud vähemalt sellise tasemega sõidukite kasutamisest, kuna see võimaldab säästa palgakulu.
Tase 5: täielik autonoomsus (steering wheel is optional) Nimetatud taseme puhul on juhtimine täiesti automatiseeritud ning sõiduk on kõikides olukordades samaväärne inimesest sõiduki juhiga. Juht ei pea sõidukis viibida ning võib tegeleda kõikide muude tegevustega. Hetkel nimetatud tasemega sõidukeid ei ole ning see nõuab sõidukile tehisintellekti olemasolu, mis peab olema samaväärne inimesega. Nimetatu eeldab sõidukilt laia spektrit teadmisi, mis väljuvad liiklusseaduses, liikluseeskirjast jm.[3]
Illustreerimaks eeltoodud tasemeid, lisan käesoleva illustreeriva viite: "Levels of driving automation". Kokkuvõtteks tuleb hetkel tõdeda, et sõidukite tootjad on hetkel välja tulnud 2. autonoomsuse taseme (Tesla Autopilot, Nissani ProPilot süsteem Nissan Leaf´il) juhtimisega. Nimetatud taseme lahendused suurendavad küll sõidu turvalisust, samas on ka juhil täis vastutus. Hetkel parim näide 4nda taseme sõidukist on Google´i Wyamo projekt.[4]
Tehnoloogia: Isejuhtivate sõidukite tehnoloogia areng
Esimene näide “isesõitvast” autost viib tagasi aastasse 1925, kui Ameerika autotootja Chandler demonstreeris autot, mis nähtavalt suutis ise sõita mööda tänavaid ja isegi läbi liiklusummiku. Kahjuks oli see vaid miraaž, sest tegelikult toimus selle reaalne juhtimine tagasõitvast autost üle raadiolainete, mille kaudu lülitati releede abil sisse-välja väikseid elektrimootoreid millega omakorda kontrolliti masina tegevust. Sisuliselt oli see väga suur puldiauto, aga kindlasti inimsilmale väga efektne, kuna samasugust demonstratsiooni korrati ka hiljem ja seadis suuna, kuhu poole püüeldi, mitmeteks aastakümneteks.
Varieerides seda esialgset ideed üritati luua isesõitvate sõidukite süsteeme, mis toimivad sõidutee sisse integreeritud juhtimis-/kommunikatsioonikanalitelt käsklusi vastu võttes. Tol ajal kindlasti väga futuristlikud ideed, mis oleksid võinud kohe-kohe kõigile kättesaadavad olla, kahjuks katsetusfaasist kaugemale ei jõudnud. Näiteks, kuigi 1960-datel Ühendkuningriigis tehtud projekti arvutuste kohaselt tasuks see ennast ära sajandivahetuseks, samal ajal hoides ära umbes 40% õnnetustest ja suurendades teede mahutavust vähemalt 50% võrra, otsustati majanduslanguse tõttu rahastamine lõpetada 1970-date keskel. Võib arvata, et kogu põhimaanteede võrgustiku ümberehitamine näis arutu raiskamisena, samuti polnud teada kuidas selline süsteem võiks tehniliselt ajale vastu pidada: liiklustihedus on kasvanud rohkem kui 40 korda.[5]
1980-datel hakkas tehnoloogia liikuma rohkem tänapäevaste lahenduste poole: Ernst Dickmanns-i[6] juhtimisel töötati välja esimene kaamerapõhine isesõitev süsteem. Kasutades kaameraid, erinevaid sensoreid, nutikaid optimiseeringuid, Kalmani (ja muid sarnaseid) filtreid ja paralleelarvuteid[7], suudeti, seda küll tühjal ja veel avamata, kiirteelõigul sõita 90km/h teemärgiste järgi.[8] 1994-dal aastal suutis Dickmanns-i süsteem sõita maha tuhandekilomeetrise teekonna mööda kolmerealist kiirteed kiirusega kuni 130km/h, vaid vähese inimsekkumisega ja seejuures autoomatselt vahetades ridu, tehes möödasõite, ning hoides ohutut pikivahet.[9] Sellest projektist kasvasid välja mitmed tänapäevalgi kasutusel olevad tehnoloogiad, näiteks adaptiivne püsikiirusehoidja[10] ja sõidukitevaheline “pilve” infosüsteem,[11] mis on ka ühed olulised komponendid tänapäevaste autonoomsete sõidukite juures.
2000-datel sai valdkond kõvasti hoogu juurde USA kaitsetööstuse arendusagentuuri DARPA isejuhtivate sõidukite võistlusest, kus oli ülesandeks läbida etteantud (takistus) rada autonoomselt. Nende tulemusena sai populaarseks Simultaneous localization and mapping (SLAM[12]), mille põhimõte on koostada või uuendada kaarti oma ümbrusest ja samal ajal hoida järge enda positsioonil. SLAM algoritme on palju ja erinevaid, sobitatud vastavalt olemasolevatele sensoritele või võimalustele. Tänapäeval kõige levinum näide sellest on robot tolmuimejad.[13] Aastal 2009 hakkas Google salaja arendama enda isejuhtivat sõidukit, mille esimene variant oli modifitseeritud Toyota Prius, millele pandi külge laserskaneerimisseade (Lidar), neli radarit, kaamera ja hunnik muid sensoreid.[14] Kuigi kõik suuremad autotootjad olid selle kallal juba mitmeid aastaid vaeva näinud, läbis Google-i masin esimesena autonoomsetele sõidukitele mõeldud “sõidueksami”, seda küll pisikeste mööndustega. Nimelt seati piirangud ilmastiku- ja teeoludele, ning marsruut valiti selline et ei läbitaks ringteid, koolialasid ega foorita raudteid. Kaasas olnud operaatorid pidid küll kaks korda juhtimise üle võtma, kuid test sai läbitud edukalt esimese korraga. Demonstreeritud sai väga suurt ettevaatlikkust ja ohutuid sõidumanöövreid, eriti ülekäiguradadel, ning oskust ennustada inimese jaoks ootamatuid olukordi.[15]
2014 aastal avalikustas Tesla oma autopiloodi tarkvara, mis suudab paljusid sõidumanöövreid autonoomselt teha, kuid siiski SAE 2. tasemel. Erinevalt Google-i tehnoloogiast, ei kasuta Tesla Lidarit[16], vaid üritab kogu kaardistamise ära teha erinevate kaameratega, radari ja sonaritega, mis muudab asja kõvasti taskukohasemaks ja ehituselt lihtsamaks. Tesla väidab et nende masinad on valmis 5. taseme autonoomsuseks, kuid see on saanud kõvasti vastukaja just Lidari puudumise tõttu.[17] Tänapäevane isejuhtiv sõiduk koosnebki peamiselt lidaritest, nii lühi- kui ka kaugmaa radaritest ja kaameratest, ning mõningatel juhtudel ka sonaritest.[18] Hetkel on kõige kõrgemad olemasolevad, 4. taseme, isejuhtivad sõidukid näiteks Waymo-l (Google tütarettevõte), kes pakub nendega avalikku juhivaba taksoteenust.[19] Kõige kõrgema, 5. taseme isejuhtivad sõidukid tänasel päeval puuduvad.
Isejuhtivate sõidukite sotsiaal-majanduslikud aspektid
Liiklusohutus
Liiklusohutuse suurenemist võib võtta ise juhtivate sõidukite massilise kasutuselevõtuga kaasnema positiivse paratamatusena. Võttes ette fakti, et 94% ränkadest õnnetusjuhtumitest on põhjustatud inimese veast,[20] olgu selleks siis juhtimisviga (vale sõidukiirus libedal teel) või otsustusveast (joobes juhtimine), siis ainuüksi selle komponendi elimineerimine tooks väga suure muutuse surmade ja vigastuste arvus. Näiteks põhjus miks Google oma esimest isejuhtivat autot ringteedele ei lubanud, ei olnud mitte selles et nad poleks seal hakkama saanud, vaid inimesed ise ei tea õigeid reegleid. Võiks arvata, et kui liikluses oleksid ainult autonoomsed sõidukid, oleks liiklusõnnetuste arv nullilähedane. Ideaalis on masin suuteline kõvasti enamaks kui inimene: ta ei väsi, näeb ja tajub mitmes suunas samaaegselt ning erinevatel füüsilistel kihtidel, suudab protsessida kiiremini ja tegeleb ainult oma põhiülesandega, ning masinad saavad omavahel jooksvalt infot vahetada.
Kuid reaalsuses pole need kõikvõimsad – õnnetusi juhtub ka nendegagi. Eelkõige käivad isesõitvate autode poolt põhjustatud juhtumitest läbi just 2. taseme autopilootide õnnetused, kust võib leida märke inimese hooletusest, kuna sealne isejuhtimissüsteem on kõigest juhiabi, ehk juht peab siiski keskenduma sõitmisele ja olema valmis kontrolli haarama kui situatsioon seda nõuab, mitte tegelema kõrvaliste asjadega., näiteks mängima telefoniga.[21] Teiselt poolt, kus kannatajapooleks on isejuhtiv masin ja selle reisijaskond, on uskumatult palju tagant sisse sõitmisi, mis annab jällegi tunnustust faktile, et inimesed ise ei suuda ohutusnõudeid järgida.
Aga on ka “arvuti” poolt põhjustatud õnnetusi, mõned isegi väga rängad. Kuna “pildi” loomine sõitmiseks käib neil tõenäosuslike mudelite põhjal, on leitud väga väikesi ja lihtsaid viise, kuidas vigu tekitada. Näiteks kleebised tuvastatavatel objektidel võivad süsteemi lolliks ajada ja valesti käituma panna. Või kui kasutusel on ainult ühte tüüpi sensorid ei pruugi neile alati sobivad tingimused olla. Siin tulevad mängu metoodikad, kus paljude erinevate sensorite väljundite põimimisel üheks saab otsuseid kindlamini vastu võtta. Isegi kui praegu ollakse täisautonoomsusest päris kaugel, on kasutusele võetud tükke tervikust lahendusest, mis muudavad ka iseseisvalt liiklemist ohutumaks. Nende alla saab lugeda igasugused juhiabisüsteemid, näiteks adaptiivne püsikiiruse hoidja, pimenurga kontroll, kokkupõrke ennetussüsteemid jne, mis on tee leidnud juba olemasolevatesse sõidukitesse.
Keskkonnasäästlikkus
Majandus- ja Kommunikatsiooniministeeriumi liiklusohutusprogramm aastateks 2016-2025 paneb rõhku ka keskkonnasäästlikkusele.
Liiklusohutuse eesmärkide saavutamiseks keskendutakse kolmele peamisele liiklusohutust mõjutavale valdkonnale. Valdkond „Vastutustundlik ja ohte tajuv liikleja“ keskendub kõigi liikluses osalejate ohutust väärtustavate hoiakute ja alalhoidliku liikluskäitumise kujundamisele. Valdkond „Ohutu keskkond“ hõlmab ohutumat ja tõhusamat liikuvust, mis on sotsiaalselt vastuvõetav ja keskkonnasäästlik ning erinevate aastaaegade liikluseripärasid arvestav. Valdkond „Ohutu sõiduk“ näeb ette ohutumate sõidukite kasutamise liikluses.
Liikluskorraldus peab kujunema lihtsaks ja arusaadavaks, sobituma keskkonda, vähendama liiklusstressi ning aitama vältida liiklemisel vigu. Meetmega tõhustatakse liikluskorralduse projekteerimist, teostamist ning järelevalvet. Töötatakse välja lahendused, mis tagavad vajadustele vastava selge ja üheselt mõistetava liikluskorralduse, sh ka ehitusobjektil. Liiklemise sujuvamaks, ohutumaks ning keskkonnasäästlikumaks muutmiseks hakatakse liikluskorralduses enam rakendama intelligentsete transpordisüsteemide (edaspidi ITS) võimalusi.
ITS-i arendused aitavad liikluses orienteeruda, liigelda sujuvamalt, soodsamalt, säästlikumalt ning vahetades andmeid ja teavet sõidukite või sõidukite ja taristu vahel. See võimaldab muuta tervikliku liiklussüsteemi sujuvamaks, arusaadavamaks, säästlikumaks ja ohutumaks. Liiklemise sujuvamaks, ohutumaks ning keskkonnasäästlikumaks muutmiseks hakatakse liikluskorralduses rakendama ITS-i võimalusi. Võetakse kasutusele üleeuroopaline sõidukist automaatselt hädaabiteate edastamise süsteem eCall. Suure liiklussagedusega maanteel ning linnatänaval arendatakse dünaamilist liikluskorraldust. See hõlmab liikleja reaalajas teavitamist ja hoiatamist liiklus-, tee- ja ilmastikuoludest ning eelnevast sõltuva kiirusrežiimi kehtestamist. Vajadusel ka liikluse ümbersuunamist. Lisaks vahetult taristule paigaldatavale juhitavale liikluskorraldusvahendile täiendatakse liikluspiirangutest ja liiklustakistustest teavitamise tehnilisi lahendusi. ITS-i lahenduste kaudu soodustatakse ühistranspordi kasutamist. Hinnatakse ITS-i rakendustest tulenevaid riske ja vajadusel kavandatakse leevendusabinõud.
[22]
Sõidukite automatiseerimine ja nende omavahel suhtlemine võimaldab säästa keskkonda, säästes kütust ja optimeerides sõiduki liikumist. Isesõitvad sõidukid on võimelised kiirendama ja pidurdama efektiivsemalt, seeläbi vähendades energia raiskamist, mis tekib mittevajalikust kiiruse muutmisest. Siiski, kuna arvatakse, et mugavam liikumine isesõitvate sõidukitega paneb inimesi rohkem sõitma, siis see võib suurenenud sõitude hulga tõttu üles kaaluda automatiseerimisest tuleneva keskkonnasäästu. Veelgi enam, kui isesõitvate sõidukitega sõites saavad inimeses tegeleda millegi muuda, näiteks õppida, töötada või mängida, siis nad võivad soovida elada töökohast kaugemal.
[23]
Kuna on tõenäoline, et isejuhtivate sõidukite kasutamisel langeks ka liiklusõnnetuste arv märkimisväärselt, siis annaks keskkonnasäästu ja energia säästu ka ohutusvarustuse tootmise ja avarii testide vähendamine. Lisaks isejuhtivatele sõidukitele saaks kombineerida ka liiklusmärkide muutumist vastavalt liiklusolukorrale, et vähendada foori taga seismist või eelistada suuremat hulka kõrvalteel liikuvaid sõidukeid mõne üksiku peateel liikuva ees. Paljud isejuhtivad sõidukid on tehtud elektri jõul liikuvad ja see ei tähenda, et need automaalselt vähendaksid energia kasutamist, kuid kindlasti vähendavad heitgaase ja õhusaastet. [24]
Mobility as a Service (MaaS)
Mobiilsus Teenusena/ Mobility-as-a-Service (MaaS) kirjeldab transpordi teenust, kus inimesel ei pea olema isiklikku sõiduvahendit vaid see teenus hõlmab nii avalikke kui ka erasektori transporditeenuseid. Reisi planeerimisel saab kasutaja valida odavuse, kiiruse või mugavuse järgi endale sobiva transpordiviisi.[25]
Läbimurre isesõitvate autode alal on vaid algus: See viis, kuidas me liigume punktist A punkti B on tervenisti muutumas, luues uue personaalse liikumise ökosüsteemi. Kui Netflix-i ärimudelit rakendada linnatranspordile, kuidas see võiks muuta linnaelanike liikumisviisi?
See küsimus on ambitsioonika initsiatiivi keskmes, mis leiab aset Soome pealinnas Helsingis, mis on seadnud aasta 2025 sihiks teha ebavajalikuks igal elanikul oma isikliku auto pidamine.
Alates aastast 2016, on Helsingi inimesed saanud kasutada rakendust nimega Whim, millega saab kasutada ja planeerida kogu linnasisest transporti - ronge, taksosid, busse, autojagamist või jalgratta jagamist ja selle eest samas rakenduses maksta. Rakenduse kasutajad saavad sisestada sihtkoha ja valida oma soovitud liikumisviisi sinna jõudmiseks. Kui ükski üksik transpordi viis ei võimalda sihtkohta jõudmist, siis pakub rakendus erinevate viiside kombinatsiooni.
Helsingi visioon esindab revolutsiooni mobiilsuses (MaaS). Selle idee tuumaks on digitaalne platvorm, milles on integreeritud reisi planeerimine, broneerimine, elektrooniline piletisüsteem ja makselahendus, mis kehtib nii avalikus kui erasektori teenuste kombinatsioonile. See on oluliselt erinev sellest, mis viisil on enamus linnade transport siiani toiminud. Selle asemel, et otsida, broneerida ja maksta iga transpordiviisi eest eraldi, MaaS platvormid võimaldavad kasutajatel planeerida ja broneerida uksest-ukseni liikumist ainult ühte rakendust kasutades.
Mis hoogustab MaaS globaalset huvi?
Sellel kui Helsingi on kasvava MaaS huvi keskmes, ei ole see linn kaugeltki üksi. Pariis, Eindhoven, Göteborg, Montpellier, Viin, Hannover, Las Vegas, Los Angeles, Denver, Singapur ja Barcelona on kõik katsetanud pilootprojekti kohalikku versiooni, mis on hõlmanud P2P platvorme ja ka kombineeritud süsteeme, mis hõlmab avaliku ja erasektori transporti.
Järjepideva linnastumise tõttu läheb suurlinnade liiklus järjest tihedamaks ja ummikud sagedasemaks ja suuremaks.
MaaS edukuses mängib suurt rolli erinevate osapoolte koos tööle panek. Erasektori osalised võivad liituda kasumi saamise eesmärgil, riigiametid võivad otsida lahendusi üldrahvalike probleemide lahendamiseks (liiklusõnnetused, tootlikkus, õhu kvaliteet, ökoloogiline jalajälg). Osalisi saadab edu vaid siis, kui nad koostööd teevad. Mõned platvormid sellegipoolest hõlmavad nii avalikku kui erasektorit ja kasutavad ühist platvormi. Vähesed platvormid võimaldavad erinevate transpordiliikide eest maksmist ühe maksena.
Veel kaugemasse tulevikku vaadates, tõenäoliselt hakkab MaaS hõlmama ka autonoomseid, ilma juhita sõidukeid. Singapur on alustanud ilma juhita takso testimisega, Uber testib juhita autosid Pittsburgh-is. Tokyo sihiks on seatud 2020 Olümpiaks panna tööle isesõitvad bussid. Kuigi autonoomsete sõidukite tehnoloogia on alles välja arenemas, on sellel paljulubav tulevik.
Autonoomsete sõidukite tehnoloogia ei ole veel valmis massikasutuseks, kuna on mitmed takistused, seaduste, turvalisuse, veakindluse, andmete kasutuse ja privaatsuse näol. Siiski arvatakse, et aastaks 2040 reisitakse umbes 80 protsenti linnasisestest miilidest (jagatud)autonoomsete sõidukitega. Paljud suuremad autotootjad on alustanud juhita autode arendamist ja Ford ja BMW on teavitanud oma püüdlusest alustada juba aastal 2021 masstootma autosid autonoomse sõidujagamisteenuse tarbeks.
[26]
Riskid ja ohud isejuhtivate sõidukite kasutusele võtmisel
Turvastandardite puudumine
Isesõitvate autode puhul on tegu viimase kümnendi reguleerimata tööstusega - erinevad autotootjad alles alustavad selles valdkonnas ning turvanõuded on seega välja töötamata. Võistlus erinevate tootjate vahel on üles kuumenemas ning kasutatud tehnoloogia olemus ei ole täielikult läbipaistev. Autonoomsed lisad rakendatakse kui juhtimisabina, ent auto sõidab hoolimata sellest kas juht hoiab käsi roolil või mitte. Teiste sõnadega toimub eksperimenteerimine inimeste peal, et täiustada autode autonoomset võimekust. Enamus liiklusõnnetuste juhtumitest üritatakse põhjendada inimeksimusega[27] ning kuna surmaga lõppevate juhtumite arv on siiski madal, siis ei ole poliitilised võimud antud tööstusele põhjalikku tähelepanu veel pööranud.
Tarkvara ja ettearvamatus
Autonoomsete sõidukite kasutuselevõtt vajab sõidukitevahelist kommunikatsiooni ja teede infrastruktuuri uuendamist. Tõhusaks liiklemiseks peaks autonoomne sõiduk saama pidada kommunikatsiooni ka ristmike ja (reguleerimata) ülekäiguradadega. Rääkimata pikemalt tarkadest linnadest on teede korrashoid endiselt probleemne ülesanne - puuduvat teemärgistust ja löökauke leiab nii ühest kui teisest kohast. Kõik infrastruktuuri puudujäägid tuleb aga lahendada keerulisema tarkvaraga.
Kuna inimene on looduse poolt ettearvamatu ning tarkvara kirjutab endiselt inimene, siis ei ole võimalik kirjutada tarkvara, mis suudaks 100% ennetada inimese käitumist. Kuni tänavatel on enamus sõidukid inimeste poolt juhitavad ning autonoomsetel sõidukitel puudub kommunikatsiooni puuduse tõttu teave nende liiklejate kavatsustest, siis keerulistes liiklussõlmedes, nagu Arc de Triomphe Pariisis, on autonoomsed sõidukid kasutud. Küll aga tarkvara arendatakse ja parandatakse edasi, kuid siiski üks rida koodi võib maksta inimelu.
Sensoririkked ilmastiku- ja keskkonnaoludest
Liigne niiskus ja kuumus ei ole kunagi hea olnud elektroonikale ning isesõitvates sõidukites on peenet elektroonikat rohkem kui teistes. Nende sõidukite ohutus sõltub sensorite ja kaamerate töökindlusest ja täpsusest - selleks peavad need komponendid hästi kaitstud olema. Samuti on vajalik, et need seadmed töötaksid ka sademetega, uduga, suitsuga, tolmuga ning isegi ereda päiksega. Sensorid võivad kergesti kattuda ka mustusega, seega tuleb regulaarselt kontrollida ning vajadusel puhastada neid vigastamata.
Häkkimisoht
Isejuhtivate sõidukite tõhusamaks toimimiseks on hea neid võrku ühendada, et hankida näiteks reaalaja liiklusinfot või teha kriitilisi uuendusi tarkvarale. Kuid võrku ühendatud sõidukid või seadmed võivad kergesti langeda küberkurjategevuse sihtmärgiks, kui turvameetmetes esineb puudujääke.
2015. aastal turvateadurid Charlie Miller ja Chris Valasek demonstreerisid Black Hat turvakonverentsil Las Vegases kuidas nad omandasid kaugkontrolli 2014. aasta Jeep Cherokee üle [28], olles võimelised saatma sõiduki kontrollvõrgustikule (CAN) oma kontrollsõnumeid. Teiste sõnadega said nad diivanil istudes arvuti klahvivajutuste abil pöörata sõitva masina rooli, seda pidurdada, lülitada raadio helitugevus maksimumile ning keelata juhtpaneeli nuppude toime jne. Turvaaugu avastuse tulemusena kutsus Fiat Chrysler Automobiles tehasesse tagasi ligikaudu 1.4 miljonit sõidukit. Ka USA sideoperaator Sprint blokeeris võrgusuhtluse selle pordi kaudu, mille vahendusel see kaugkontroll võimalikuks osutus. Antud sõiduk ei olnud küll isesõitev, kuid juhtum tõestab, et igasugune uus tehnoloogiline lahendus tuleb uute avastamata turvaaukudega.
Georgia Tehnoloogiainstituudi teadlane Skanda Vivek viis läbi uurimuse, mille tulemusena leidis, et 10% kompromiteeritud sõidukeid tipptunnil Manhattanil võib halvimal juhul tähendada kogu linnaosa liikluse seismajäämist, millega koheselt saab kannatada hädaabiteenuste kättesaadavus. Kuna mõnede autotootjate autod just moodustavadki ligikaudu 10% linna liiklusest, siis neil tootjatel on just suurem vastutus kanda erinevate võrkude ja süsteemide rakendamisel, et turvaaugu ilmnemisel oleks mõjutatud vaid osa tervikust.[29]
Võimalikud terviseriskid elektromagnetkiirgusest
Kuna ühiskond näeb tulevikus autonoomsete elektriautode massilist kasutust, siis võiks tänapäeva hirmu tõttu riskina ka välja tuua elektromagnetilisest kiirgusest (EMK) põhjustatud terviseprobleemid. Kuigi kõik tänapäeva sõidukid tekitavad kiirgust, siis on selle tasemed massilise elektroonika ja mitmete akude tõttu elektriautodes kõrgemad. Siiski erinevad uuringud on leidnud, et kiirgustase elektriautodes jääb alla piirnormide ja on ohutu arvestades inimese teisi igapäevaseid kokkupuuteid[30][31][32]. Muidugi ei tasu unustada, et mõned inimesed on või arvavad olevat tundlikumad EMK suhtes, seega võib see neil põhjustada peavalu, väsimust, unetust jne.
Autonoomsete sõidukite juriidilised aspektid
Autonoomsete sõidukite juriidilised aspektid on tänapäeval äärmiselt aktuaalne valdkond, mis vajab kaardistust ja reguleerimist. Õiguspoliitiliselt võib temaatikale olla erinevaid lähenemisi, kuid teaduslikud uuringud on kindlalt ühel meelel – esile kerkivad tehnoloogiad muudavad ühiskonna ilmet. Kui igas kodus ja ettevõttes saab olema autonoomne robot, mõjutab see ühiskonda oluliselt, sest inimesed hakkavad töötama ja elama koos ja koostöös keerulise tehnoloogiaga. Seega lisaks isejuhtivate sõidukite reguleerimise võimalustele ja vajadustele on küsimus laiem, sest isejuhtivus ei ole omane ainult SAE 4 ja 5 sõidukile, vaid ka muule intelligentsele tehnoloogiale. Juriidilise poole pealt on üheks oluliseks takistuskiviks asjaolu, et tehnoloogiat, mida tahetakse reguleerida, ei eksisteeri hetkel väljaspool laboriruume või antud tehnoloogia ei ole kättesaadav. Arvestada tuleb kindlasti sellega, et tänapäeval areneb tehnoloogia pöörase kiirusega. 2018. aastal tootis inimkond andmeid rohkem kui inimkonna kogu senise ajaloo jooksul kokku. Teaduse tase tõusis märkimisväärselt just algoritmide ning neurovõrkudel põhinevate süsteemide valdkonnas. See omakorda tähendab, et tehnoloogiad, mis on täna kättesaadavad vaid laborite seinte vahel, saavad suurema tõenäosusega juba lähitulevikus ka tavainimestele kättesaadavaks. Nad muutuvad järjest autonoomsemateks ja intelligentsemateks. Eelkõige seisab olemasolev õigus silmitsi väljakutsetega seoses inimväärikuse, eetika ja vastutusega. Innovatsioon pole ainult tehniline arendus, mille tulemusest kujuneb ühiskondlik väärtus, vaid ka tõsine seadusandlusele suunatud töö, mis on paljude jaoks märkamatu. Targad „masinad“ vajavad mitte vähem targemaid seadusi. Enne kui asuda seadusmuudatuste kallale, tuleks juristidel otsustada, kas tehisintellekti ja robotitega seonduv valdkond nõuab positiivse õiguse muutmist või piisab tehnoloogiliste muutustega tegelemiseks olemasolevast normistikust. Tsiviilõiguses tuleb küsida, kas on vajalik kontseptuaalne muudatus alates süüst, vastutusest ja eetilisest etteheidetavusest teole, kus puudub inimeksimus või kellele tegu ning tegevusetus üldse omistada. Seadusandlikud küsimused on tänapäeval põhiliseks takistuseks autonoomsete sõidukite loomise efektiivseks lahenduseks terves maailmas. Autonoomse transpordi valdkonna seaduslik regulatsioon omab nii edukaid kui ka nurjunud näiteid. NHTSA (National Highway Traffic Safety Administration) võrdväärtustas ametlikult 2016. aastal inimjuhti elektroonse süsteemiga, mis juhib autonoomset sõidukit Google. Antud otsus välistab põhilist takistust autonoomstete sõidukite arendamises. Enamuse riikide seadusandlus keelab hetkel täielikult ära autonoomsete sõidukite kasutusele võtmist ühiskasutatavatel sõiduteedel. EL riikides on vastu võetud erandlikud seadusandlikud aktid autonoomsete sõidukite osas. Näiteks vastavalt EL-i 1. jaanuari 2016 direktiividele 347/2012 ja 351/2012 peavad kõik EL-is registreeritud või kasutatavad veokid olema varustatud spetsiaalsete liiklusohutust tagavate süsteemidega. EL direktiiv nr 347/2012 näeb ette kõigi uute veokimudelite kohustusliku varustamise Lane Keeping Assist’iga (sõiduradade hoidmise abisüsteem) ja AEB-ga (automaatne hädapidurdus) alates 1. novembrist 2018.
Seadusandluses on kõige rohkem ette jõudnud USA, kus on vastu võetud üksikud seadusandlikud aktid autonoomsete sõidukite testimise ja liikumise osas (nt Florida, Nevada, Michigan). Arizonases üritati vastu võtta seadus, mis reguleerib autonoomse sõiduki kasutamist riigi maanteedel. Samas ei suudetud lahendada probleemi, kes peaks vastutama sellise sõiduki osalusel toimunud õnnetuse põhjustamise eest: auto omanik, tehnoloogiat arendanud ettevõte või autot tootnud või siis müünud tootja. California võimud avalikustasid 2015. aastal autonoomsete sõidukite suhtes esialgsed eeskirjad. Nimetatud eeskirjade kohaselt peaksid autonoomsete sõidukite juhid vastutama liikluseeskirjade rikkumiste eest, olenemata sellest, kas nad olid sõiduki roolis või mitte. Eeskirjad nõuavad autojuhtidelt vajadusel täielikku valmisolekut oma auto üle kontrolli ülevõtmiseks. See kujutab endast potentsiaalselt probleemi nt Alphabet ettevõte jaoks, kuna selle loodud autonoomse sõiduki prototüübil polnud esialgselt rooli ega pedaale. Venemaa seadusandjad tegid ettepaneku lubada üldkasutatavatel teedel autonoomseid sõidukeid kasutada vaid juhul, kui sõiduki salongis asub ka juht, kes vajadusel saab juhtimisprotsessi ümber lülitada manuaalsele režiimile. Autonoomseid sõidukeid puudutavas eelnõus on vastus põhiküsimusele: kes peaks vastutama autonoomse sõiduki osalusel toimunud liiklusõnnetuse eest, kas auto omanik, tehisintellekti süsteemi välja töötanud ettevõte või autot tootnud ja müünud autotootja. Venemaal langeb vastutus liiklusõnnetuse eest täielikult autonoomse sõiduki juhile. Kuidas aga vastutust õigesti ja proportsionaalselt jagada? Venemaa „Tomashevskaja ja partnerid“ intellektuaalomandi ja infotehnoloogia valdkonna õigusnõustaja Roman Yankovsky sõnul pakutakse probleemi võimaliku lahendusena autonoomsete sõidukite vastutuskindlustust ehk vahendaja kasutuselevõttu omaniku ja autonoomse sõiduki osas: näiteks isejuhiavate sõiduktie müügist täiendava spetsiaalse fondi loomine. Samuti on olemas võimalused sõidukisse spetsiaalsete seadmete paigaldamiseks, et registreerida juhi toimingud ja määrata kahjude osas maksete jaotuse proportsioonid. Kriminaalvastutus on mõnevõrra erinev, kus täielikult autonoomse sõiduki omanik ei ole tekitatud kahju korral juhtunud liiklusõnnetuses alati süüdi. Süü tehakse kindlaks vastavalt isejuhitavate sõidkite arendamise ja ekspluateerimise reeglite kohaselt: kui neid reegleid ei rikutud, tunnistatakse surm õnnetusjuhtumiks ja vastutust ei tule, kui rikuti – tunnistatakse rikkuja kuriteos süüdi. Kõik hakkab olenema seadussätete täpsest sõnastusest. Samuti ühe võimaliku lahendusena on autonoomsete sõidukite tootmisega seotud ettevõtete vabatahtlik kahju hüvitamise algatus isegi juhul, kui autonoomne sõiduk polnud liiklusõnnetuses süüdi. Roman Yankovsky peab silmas olukorda, kui nt jalakäija ületab teed selleks mitte ettenähtud kohas ning autonoomne sõiduk ei jõua õigeaegselt piduradada ning sõidab temale otsa, tekitades vigastusi. Õiguslikus mõttes langeb vastutus süüdi olevale poolele ehk jalakäijale. Arvestades eetilisi ning moraalseid tõekspidamisi, on autonoomse sõiduki arendajast ettevõttel õigus maksta kannatanule kompensatsioon ning olla vastutulelik isegi juhul, kui ettevõte pole liiklusõnnetuses süüdi. See ainult kinnitab antud ettevõte prestiiži ja staatust ühiskonnas.
Ka Suurbritannias on põhiküsimuseks – kes kannab juriidilist vastutust sõidukit juhitava tehisintellekti algoritmi tegevuse eest. 2018. aastal startis seal kolmeaastane uuring seoses autonoomsete sõidukite juurutamisega ning sellega seotud juriidiliste aspektidega. Antud uuringu tulemustele tuginedes otsustavad eksperdid, mis seadusandlikud muudatused on vajalikud selleks, et riiklikul tasandil reguleerida robotmasinate kasutusele võtmist. Hetkel ei anna briti võimud isegi lootust asjaolule, et autonoomses sõidukis puudub rool ja pedaalid ning juhi kohal valitseb „tühjus“. Ametnikud arutavad vaid seda, kuidas jaotada kriminaal- ja tsiviilvastutust autonoomse sõidukiga liiklusõnnetuse puhul. Järelikult käib arutlus maksimaalselt neljanda astme autonoomse sõiduki juurutamise ümber. Viienda astme autonoomsete sõidukite kasutusele võtt on Suurbritannias täielikult välistatud. Läbi viidud uuringu tulemusena sõnastatakse uued kuriteo koosseisud, nt küber-sissemurdmine autonoomse sõiduki juhtimissüsteemidesse. BMW tegevdirektor Ian Robertson kommenteeris olukorda järgnevalt: „Arvan, et pärast selle teema uurimist ütlevad valitsused või seadusandjad, et täielikult autonoomseid sõidukeid ei tohi mingil juhul avalikele teedele lubada.“ I. Robertson’i arvates jõuavad samale järeldusele kõigi riikide ametivõimud, kes hetkel mõtlevad autonoomse transpordi kasutuselevõtmisele.
Ka Eestis Riigikantselei strateegiabüroo tellimusel viidi läbi (käivitati 2016. aasta septembris) isejuhtivate sõidukite ekspertrühma raames analüüs, mille üheks eesmärgiks oli Eesti seadusandluse kohandamine ja vajaliku järelevalve korraldamine isejuhtivate sõidukite kasutamise võimaldamiseks Eesti teedel ja tänavatel. Analüüs käsitles tulevikutehnoloogiaid (SAE tase 4 ja 5), mis on alles väljatöötamisel. Samas juba praegu on müügis sõidukid, mis on varustatud autonoomset režiimi võimaldavate juhiabi süsteemidega, mille kasutamiseks on juhid valmis ja tõenäoliselt seda ka juba teevad (SAE tase 2). Paraku jätab EV-s kehtiv õigus need juhid kaitseta, kuna nad vastutavad juhtimise eest olenemata sellest, kas sõiduk sõitis isejuhtivas režiimis (täielik kontroll auto üle oli antud tehnoloogiale) või mitte. Analüüsi tulemusena leiti, et põhi-eesmärgiks ei saa kindlasti olla pelgalt seadusandluse kohandamine ja isejuhtivate sõidukite kasutuselevõtt, vaid et edasine õigusloomealane tegevus nimetatud valdkonnas peaks looma Eesti riigi ja inimeste jaoks uue kvaliteedi. Antud analüüsis on pööratud enim tähelepanu üldseaduste muutmise ning robootika spetsiifilise regulatsiooni loomisele, samuti keskenduvad regulatiivsed lahendusettepanekud liiklusõiguse spetsiifikale. Hetkel on isejuhtivate sõidukite (SAE tasemed 4 ja 5) peamiseks üldkasutatavatel teedel liiklemise takistuseks juhi (ja tegeliku kontrolli) puudumine. Väga oluline on käsitleda tehnoloogilisi termineid ja nende tähendust, kuid robootika ja tehisintellekti valdkonnas valitseb terminoloogiline segadus, mille on võimatu arutelu, sest arusaam vaatlusalusest objektist on erinev. Analüüsis on lahendusettepanekuna “isejuhtiva sõiduki“ ja „operaatori“ legaaldefinitsioonide sisseviimine. Definitsioonid on lahti seletatud järgmiselt: Isejuhtiv sõiduk - mootorsõiduk, millesse on autonoomne tehnoloogia sisse integreeritud. Operaator - isik, kes istub juhiistmel või kui selline isik puudub, on operaator isik või robot, kes põhjustab autonoomse tehnoloogia rakendumise/tööle hakkamise. Seega opereerib isejuhtivat sõidukit operaator (isik) või intelligentne robot tingimusel, et tema tegevus, kontroll ja järelevalve on kooskõlas rahvusvaheliste konventsioonidega ning defineeritud ka eriseaduses, nt robootikaseaduses. Autonoomset sõidukit võib alati juhtida ka vahetu juht kui selline sõiduviis on sisse lülitatud. Analüüsis on lahti kirjutatud neli erinevat stsenaariumi koos põhiprobleemidega, millele on toodud välja vastavad lahendusettepanekud. Erinevate ekspertide koostöö tulemusena valiti välja kõige sobivam stsenaarium, mis on tulevikuvaatega, ning koostati vastava seaduseelnõu väljatöötamiskavatsus. Peamiselt seisis eksperdite ning juristide ees küsimus, kas reguleerida pelgalt isejuhtivate sõidukite testimise ja kasutuselevõtuga seonduvat või käsitleda isejuhtivaid sõidukeid kui autonoomseid intelligentseid sõidukeid ning reguleerida kogu uut tehnoloogiat ja sellega seotud isejuhtivust kompleksselt. Kuna iseõppivast tehnoloogiast saab lähitulevikus osa inimeste igapäevaelust siis on tähtis leida võimalikult lihtne ja selge regulatiivne lahendus. Samuti on tehtud ettepanek robootikaseaduse loomiseks ning isejuhtivate sõidukite „intelligentseteks robotiteks“ ja erimõistega „robot-agendiks“ nimetamiseks. 15. oktoober 2019 sai E-Eesti nõukogu ülevaate isejuhtivate sõidukite hetkeseisust ja perspektiivist, kus jõuti tõdemusele, et kui isejuhtivate sõidukite testimine Eesti avalikel teedel on juba seadustatud ja toimib, siis laiema õigusruumi kohaldamiseks on vajalik ära oodata kratiseaduse jõustumist, mis paralleelselt tehisintellekti kasutamise kõrval kaitseks ka inimest. „Kehtiva seaduse järgi vastutab oma tegevuse eest liikluses sõiduki juht,“ kirjeldab E-Eesti nõukogu tööd juhtinud peaminister Jüri Ratas ning lisab, et reguleerimata on vastutus aga isejuhtiva auto otsuste eest. Nn kratiseaduse eelnõuga, kuhu on isejuhtivaid sõidukeid puudutav regulatsioon samuti lisatud, tuleb justiitsministeerium välja 2020. aasta keskpaigas.
Õigusloome seisukohalt on väga tähtis jõuda järeldusele kas autonoomsete sõidukitega, tehisintellekti ja robotitega seonduv valdkond nõuab täielikult positiivse õiguse muutmist või piisab tehnoloogiliste muutustega tegelemiseks juba olemasolevatest seadusandlikest aktidest ja kehtivast normistikust. Tsiviilõiguse vaateväljast tuleb otsustada, kas seadustes on vajalik ulatuslik muudatus alates süüst, vastutusest ja eetilisest etteheidetavusest teole, kus puudub inimeksimus või kellele tegu või tegevusetus üldse omistada. Selge on see, et uus tehnoloogia ei saa areneda õigusliku teadmatuse keskkonnas. Samas tuleb tehisintellekti valdkonda reguleerida nii vähe kui võimalik ja nii palju kui vajalk. Sekkumine õigusaktidesse peab olema õigustatud vaid juhul, kui ühiskondlik või tehnoloogiline muutus on tõepoolest nõutav ja vajalik. Tuleb hoiduda liigsest reguleerimisest, mis viib innovaatilisuse ja selguse asemel kaootiliste tulemusteni.
Üheks võimalikuks alternatiiviks, mille üle on õigus- ja tehnoloogiakirjanduses asutud aktiivselt arutlema, on autonoomse intelligentse roboti käsitamine teatud juhtudel inimese (või juriidilise isiku) agendina. Sel juhul antakse robotile nii õigusvõime kui ka piiratud teovõime. Antud variant oleks nii sotsiaalselt, äriliselt kui ka poliitiliselt kasulik. Robootika valdkonnas tuleb tsiviilõiguse norme reguleerida ja kaaluda võimalust luua robotitele eraldi õiguslik staatus selleks, et vähemalt kõige keerukamad autonoomsed robotid omaksid elektroonilise isiku staatust eraldi õiguste ja kohustustega, sh hüvitada nende tekitatud kahju ja rakendada elektroonilist isiksust juhtudel, kus robotid teevad autonoomseid otsuseid või suhestuvad muul viisil iseseisvalt kolmandate isikutega.
Eesti õigus sisaldab instituute, mis lubaksid analoogia alusel anda intelligentsele autonoomsele robotile õiguse (ja sellega kaasnevad kohustused) oma omanikku ja valdajat esindada. Alternatiivina mistahes esindamisõiguse andmisele võib vaadelda robotipidaja tahteavalduse kehtivust mistahes tagajärgede eest, mille toob kaasa autonoomse intelligentse roboti kasutamine. Küsimuseks on olukorrad, kus tehing tehakse roboti vahendusel. Kuidas hinnata intelligentse roboti tehtud tehinguid, kus ei ole lahatud inimese õigusliku tagajärje tahe? Õigusliku tagajärje tahet pole võimalik tuletada, sest me ei tea ette võimalikke õiguslikke tagajärgi ja tehisintellekti puhul ei tea inimene/ostja igas olukorras tulemust/tehingut ette. Konkretiseerimatuse põhjusel ei ole tegemist ka tahteavaldusega vaikimise või tegevusetuse kaudu. Seega ei sobitu intelligentse roboti abil/vahendusel tehtud tehing ühegi TsÜS § 68 lõigetes 2–4 toodud tahteavalduse liigi alla.
Tehingute sõlmimise võimalusi roboti abil/vahendusel saab liigitada järgmiselt:
- Esindamine kõrgetasemeliste robotite puhul. Kehtiv õigus ei võimalda robotil esindaja olla, sest esindaja saab olla õigus- ja teovõimeline isik. Robot-agendi all mõeldakse intelligentset robotit, kes teatud tingimuste täitmisel omandab piiratud õigus- ja/või teovõime. Samas ei ole robot-agent võrdsustatud ei eseme ega isikuga, vaid olenevalt vajadusest kohaldatakse talle eseme või isiku kohta sätestatut TsÜSi mõttes. Intelligentne robot, kellele ei ole omistatud piiratud õigus- ja/või teovõimet, on käsitatav esemena (sh suurema ohu allikana, tuues kaasa süüta vastutuse selle valdajale).
- Uue tahteavalduse liigi loomine, mis hõlmaks tahteavalduse tegemise roboti vahendusel ning selle autonoomia piirides. Intelligentse roboti kaudu saab tema omanik või valdaja anda nõusoleku tehingu tegemiseks TsÜSi ja VÕSi mõttes. Intelligentne robot on käsitatav asjana, millele kohaldatakse teatud juhtudel looma kui asja käsitlevaid sätteid eesmärgiga tunnustada intelligentse roboti autonoomset, kontrollimatut ja iseõppivat osa, tagades sellega ühetaolise lepingu- ja deliktiõiguse.
- Robootikaseaduse loomine, kus oleks defineeritud intelligentse roboti mõiste, intelligentse roboti tootja ja pidaja õigused, kohustused ja vastutus. Antud lahenduse kohaselt ei ole robotipidajal võimalust lubada intelligentsele robotile õigus- ja/või teovõimet ega tahteavalduste tegemise võimalust TsÜS ja VÕS mõttes.
- Olemasoleva õiguse juurde jäämine (de lege lata tegutsemine). Eesti õigusaktide kohandamine kitsalt üksnes mootorsõidukitega seoses (nt liiklusseadus, selle rakendusaktid, karistusseadustik jt).
Peamiselt on küsimus selles, kas on vajadus reguleerida ainult isejuhtivate sõidukite testimise ja kasutuselevõtuga seonduvat või ollakse valmis käsitleda isejuhtivaid sõidukeid kui autonoomseid intelligentseid sõidukeid ehk iseõppival tehnoloogial põhinevaid roboteid. Kas reguleeritakse kogu uut tehnoloogiat ja isejuhtivust kompleksselt. Iseõppiv tehnoloogia saab lähitulevikus osaks inimeste igapäevaelust, seega on oluline harjuda mõttega uuest normaalsusest ning leida sellele võimalikult lihtne ja selge regulatiivne lahendus. Selleks et vältida iga uue tehnoloogia loomisel ja kasutuselevõtul uue regulatsiooni igakordset spetsiifilist loomist, tuleks koostada konkreetselt robotite valdkonda käsitlev regulatsioon (robootikaseadus) ning nimetada isejuhtivaid sõidukeid üldmõistega „intelligentne robot“. Olles riigi ja ühiskonnana varajane omaksvõtja, on Eestil võimalus olla teerajaja konkreetse tehnoloogia rolli mõtestamises ühiskonnas ja majanduses. [33] [34] [35] [36] [37] [38] [39] [40] [41] [42] [43] [44]
Isejuhtivate sõidukite otsustusprotsessid liiklus- ja ohuolukordades
Et sõita inimesest paremini on isesõitvad masinad varustatud erinevate kaamera, GPS, ultraheli, radari ja kallimate lidari sensoritega, mis annavad parema taju sellest, mis liikluses toimub, kui inimesel seda endal on. Enamus autodest juba kasutavad erinevaid kaameraid ja radareid juhi- ja parkimisabi näol ning tagavad isegi madalamad autonoomsuse tasemed. Täisautonoomsuse tarbeks on aga lidarid, mis kiirete nähtamatute laserisignaalide abil moodustavad punktipilved ümbruskonda jäljendavas kolmemõõtmelises ruumis. Kõikide nende sensorite sisendandmed saadetakse tehisintellekti keskprotessorile kombineerimiseks ja töötlemiseks, millega saadakse 360-kraadine ülevaade, mis sõiduki ümber toimub. Selles ülevaates tehakse kindlaks näiteks erinevad tehis- ja inimobjektid, nende distants ja kaugus. Nende andmete põhjal tagatakse ka rajavahetuse otsuse ohutus sarnaselt nagu pimenurga hoiatusandur tavalistes sõiduautodes.
Tehisintellekti abil suudavad isesõitvad sõidukid tuvastada ja reageerida keskkonnale reaalajas. Selline intellekt kasutab sügavnärvivõrgustiku (DNN - Deep Neural Network) mudeleid, mis lihtsamas tähenduses koosnevad matemaatiliste algoritmide jadadest. DNN inspiratsiooniks on inimaju, mis on võimeline ise õppima. Seega õpetatakse mudelile objektide samastamist ja eristamist selle asemel, et iga objekti kõikvõimalikud iseärasused arvutiprogrammis ära defineerida. Aga nagu iga inimene on erinev ja spetsialiseerub mingitele kindlatele eesmärkidele elus, siis on ka mudelid oma kindla ülesandega ning turvalisuse mõttes ka kohati kattuvad. Et kui üks närvivõrgustiku mudel ei tuvasta mingit konkreetset objekti, siis on ikkagi võimalus, et teine tuvastab. Otstarbe järgi võiks välja tuua rajaleidjaid ja objektituvastajaid. Rajaleidjateks on võrgustikud, mis tuvastavad kogu tee ruumi, teekattemärgistust sõiduteel, sõidukist eespoolset sõidetavat rada jms. Objektituvastajateks aga võrgustikud, mis tuvastavad teisi sõidukeid, jalakäijaid, valgusfoore ning liiklusmärke, eraldi valgusfooride värve ja liiklusmärkide tüüpe, ning veel ristmikke ja peatumisolukordi.
Peale tuvastusalgoritmide on vaja probleemide lahendamiseks ka võimsaid otsustusalgoritme põhieesmärgiga jõuda efektiivselt punktist A punkti B vältides liiklusõnnetusi. Õnnetused ja ohuolukorrad tekivad aga kahel peamisel põhjusel - viletsad otsused või sensorid ei tuvasta. Kuna isesõitvad sõidukid on endiselt arenev valdkond, siis tarkvaras esineb tihti palju puudujääke, kui tuleb arvestada inimkaasliikleja võimaliku käitumisega. Näiteks uue arvestamata ohu korral vähendatakse sõiduki kiirust kuni peatumiseni ja lihtsalt oodatakse ohu möödumist, kuigi tegelikult tuleks edasi jälgida ka seismisest tulenevaid ohte. 2017. aasta novembris oli Las Vegases olukord, kus uhiuus isesõitev buss sattus liiklusõnnetusse esimese kahe tunni jooksul[45]. Buss tuvastas ees tagurdava veoki ja otsustas seisma jääda, kuid veokijuht tagurdas üha lähemale ning ei näinud paigale tarretunud bussi. See õnnetus oleks ilmselt ära jäänud, kui buss oleks osanud ka tagurdada või vähemasti signaali anda. Palju kurvem inimeluga lõppenud õnnetus oli aga 2016. aastal Floridas, kus Tesla mudel S sõitis sisse maanteele keeravale veoki haagisele [46]. Õnnetuse hetkel sõitis sõiduk kiirusega 119km/h ning Tesla sõnul nii juht kui sõiduk ei märganud teele keeravat veokit. Nimelt toodi põhjuseks, et sõiduki sensorid ei suutnud vahet teha eredal taeval ja valgel haagisel. Tesla on rõhutanud, et tegu ei ole täisautonoomse lisaga, vaid pigem juhiabiga ning et enne õnnetust oli sõiduk korduvalt juhti hoiatanud, et too hoiaks käed roolil.
Sensorid koguvad toored andmed, närvivõrgustikud loovad nende põhjal ettekujutuse keskkonnaruumist, tuvastatud sündmused edastatakse otsustusprotsessi, mis valib kõikvõimalikest manöövritest teostatava ja sobivaima. Teostatav on manööver, mis on ohutu ja liiklusreeglitega kooskõlas. Sobivaim on aga üks teostavatest manöövritest, mille valimisel lähtutakse selle efektiivsusest, ökonoomsusest, mugavusest jm. Kuna igat manöövrit on võimalik sooritada lõpmatul erineval viisil, näiteks erineva trajektooriga, siis tehakse manöövri välja selgitamisel hulganisti simulatsioone arvestades ka võimalike juhuslike sündmustega. Kuna trajektoore läbitakse ajas, siis tehakse ka ennustavaid kalkulatsioone, näiteks arvutatakse välja erinevate sündmuste tõenäosus järgneva 6-10 sekundi jooksul. Kuigi täpsemad otsustusprotsessi meetodid on tootjate puhul varieeruvad ja on pigem ärisaladus, on siiski tehtud mitmeid erinevaid teaduslikke uurimistöid, mis võivad sisaldada lõplikke olekumasinaid (finite state machine), Markovi otsustusprotsessi (Markov decision process), mänguteooriat (game theory), stiimulõpet (reinforcement learning) jm.
Olenemata kasutatud otsustamismeetoditest või viimasel tasemel riistvarast, jääb keeruliseks probleemiks siiski inimliikleja mõistmine, näiteks jalakäijate ja ratturite käežestide interpreteerimine. Samuti ohuolukorras eetiliste otsuste langetamine nagu õnnetuse vältimiseks liiklusreeglite rikkumine või väljapääsmatus olukorras ühe elu teise üle kaalumisel. Inimliikleja mõistmiseks teadlased Massachusettsi Tehnoloogiainstituudi (MIT) arvutiteaduste ja intelligentsi laboris (CSAIL) arendavad tehisintellektisüsteemi[47], mis liigitaks liiklejad nende sotsiaalse isiksuse järgi, et parendada isesõitva auto otsustamisvõimekust keerulistes oludes. Need isiksuseliigid on isetu, isekas ja koostöövalmilik. Selle projekti üks näidiseesmärkidest on anda autole võimekus rada vahetada tihedas linnaliikluses või lasta seda teisel liiklejal teha. Tuvastades missugune liikleja on egoistlik saaks varakult planeerida võimalikke ohte vältivaid otsuseid. Lisaks liiklejate liigitamisele arendavad mõned tootjad nagu BMW ja Audi sõidukitevahelist kommunikatsiooni intelligentsemaks liiklemiseks[48]. Sellise suhtluse abil saavad autod kiiremini võimaluse sõidurada vahetada või vältida tagant sissesõitu kui eesmine auto on planeerinud äkkpidurduse sooritada.
Kokkuvõte
Isejuhtivad autod on suurepärane proovikivi tehisintellekti jaoks - kuigi varasemalt on arvuti alistanud maailmameistri inimmõistuse jaoks keerukates lauamängudes nagu male ja Go, osutusid need masinmõistuse jaoks suhteliselt lihtsaks ja jõumeetodil lahendatavaks. Vaja oli lihtsalt piisavalt kiiret arvutit, et kõik käiguvariandid läbi vaadata. Samal ajal autosõit, mis enamike inimeste jaoks on õpitav, on osutunud arvuti jaoks üle mõistuse keeruliseks.
Isejuhtivad autod on olulised ka majanduslikust vaatepunktist, võrreldes tavaautodega on neil järgmised eelised:
94% liiklusõnnetustest Ameerika Ühendriikides toimub juhi eksimuse või tähelepanematuse tõttu. Isejuhtiv auto on kogu aeg täielikult keskendunud sõitmisele ja ei lase ennast häirida ilusatest vaadetest ega karjuvatest lastest tagaistmel ning võiks tänu sellele olla ohutum. Enamust autodest kasutatakse peamiselt ainult tööle ja koju sõitmiseks ning 95% ajast seisavad need pargituna. Isejuhtivate sõidukite tehnoloogia võimaldaks tühjalt seisvate autode hulka vähendada, kasutades neid päevasel ajal näiteks taksodena. Jagatavate autode suurem osakaal võimaldaks vähendada transpordi koormust keskkonnale. Samas kaasnevad isejuhtivate autode kasutuselevõtuga ka mitmed ohud:
Hetkel on raske anda garantiisid, et isejuhtiv auto on ohutum kui inimjuht. Kuigi tehisintellekti vallas on tehtud suuri edusamme, on reaalses liikluses ikkagi väga palju erinevaid olukordi ja kõigi nende arvestamine käib ka tänapäevasele tehisintellektile üle jõu.
Väidetavalt kaotab isejuhtivate autode kasutuselevõtu tulemusena oma töö 50-70% veoautojuhtidest, sarnane saatus tabab kindlasti ka paljusid taksojuhte. Nendele inimestele muu rakenduse leidmine on suur väljakutse. Tõenäoliselt ei juhtu nende töökohtade kadumine siiski päevapealt, vaid pikema aja jooksul, mis annab ühiskonnale võimaluse reageerida, pakkudes neile loovamaid ja mitmekülgsemaid ülesandeid.[49]
Eksperdid on eriarvamusel, millises ajahorisondis jõuavad isejuhtimise tehnoloogiad laialdasse kasutusse. Kindel on see, et alustatakse lihtsamatest ülesannetest nagu näiteks pakivedu. Siin ongi üheks eestvedajaks Eesti oma idufirma Starship Technologies.
Isejuhtivate taksode vastu tunneb huvi Eesti idufirma Bolt. Siinkohal olgu ära toodud robootikaeksperdi Rodney Brooksi 2018. aasta jaanuaris tehtud ennustused isejuhtivate taksode kasutuselevõtu osas. Igal aastal vaatab ta need ennustused üle ja märgib millised on täitunud ja millised mitte.[50]
| Rodney Brooksi ennustus | Varaseim aeg |
|---|---|
| Esimene juhita taksoteenus ühes Ameerika Ühendriikide suurlinnas, millel on fikseeritud pealetuleku ja mahamineku kohad ning piirangud ilmastikutingimustele ja töötamise ajale. Sisuliselt on tegemist juhita marsruuttaksodega. | 2022 |
| Samasugune taksoteenus 10 Ameerika Ühendriikide suurlinnas. Piiranguvälistel aegadel kasutatakse autot koos juhiga (sensorid muutuvad nii palju odavamaks, et sama autot on mõtet kasutada koos juhiga). | 2025 |
| Selline taksoteenus on 50 või 100 suuremas Ameerika Ühendriikide linnas. | 2028 |
| Juhita taksoteenus suuremas Ameerika Ühendriikide linnas, nii et peatumiskohad pole piiratud. Ala võib olla piiratud. | 2032 |
Kasutatud materjalid
- ↑ "https://en.wikipedia.org/wiki/Self-driving_car"
- ↑ "SAE Standards News: J3016 automated-driving graphic update"
- ↑ "Tehisintellekti_algkursus"
- ↑ "Self-driving cars: Autonomous driving levels explained"
- ↑ Telegraph, "Cruising into the future"
- ↑ Wikipedia, "Ernst Dickmanns"
- ↑ "Prof. Schmidhuber's highlights of robot car history"
- ↑ Politico, "The man who invented the self-driving car"
- ↑ "PROMETHEUS Project"
- ↑ "Adaptive cruise control"
- ↑ "Vehicle-to-X"
- ↑ "SLAM"
- ↑ "https://www.technologyreview.com/2015/09/16/247936/the-roomba-now-sees-and-maps-a-home/"
- ↑ "How Google self-driving car works"
- ↑ "https://spectrum.ieee.org/transportation/advanced-cars/how-googles-autonomous-car-passed-the-first-us-state-selfdriving-test"
- ↑ "https://www.theverge.com/2019/4/24/18512580/elon-musk-tesla-driverless-cars-lidar-simulation-waymo"
- ↑ "https://www.mercurynews.com/2019/06/17/elon-musk-calls-lidar-stupid-but-most-self-driving-cars-use-it-whos-right/"
- ↑ "Introducing 5th generation Waymo Driver"
- ↑ "Waymo One launches."
- ↑ "Automated vehicles for safety"
- ↑ "https://www.bbc.com/news/technology-51645566"
- ↑ Liiklusohutusprogramm 2016-2025,[1]
- ↑ Self-driving car, [2]
- ↑ https://blueandgreentomorrow.com/, [3]
- ↑ Wikipedia, [4]
- ↑ [5]
- ↑ ScienceDaily, "Public blame accidents on drivers more than their automated cars when both make mistakes", October 28, 2019
- ↑ IOActive, "Remote Exploitation of an Unaltered Passenger Vehicle", 2015
- ↑ ScienceDaily, "The first look at how hacked self-driving cars would affect New York City traffic", March 4, 2019
- ↑ Bio Electro Magnetics 34(2), "ELF magnetic fields in electric and gasoline-powered vehicles.", 2013
- ↑ IEEE Transactions on Electromagnetic Compatibility, "Magnetic Field Exposure Assessment in Electric Vehicles", 2014
- ↑ Consumer Reports News, "Mythbuster: EMF levels in hybrids", 2010
- ↑ 1. Riigikantselei, Ekspertrühma lõppraport „Isejuhitavate sõidukite ajastu algus“ 2018
- ↑ Juridica 1/2019, Karmen Turk, Maarja Pild, „Kratiga või kratita – see on küsimus. Robotitest ja tehisintellektist tsiviilõiguslikult“, lk 43-55.
- ↑ Vabariigi Valitsus, Isejuhtivad sõidukid ootavad seadusemuudatust, 15. oktoober 2019
- ↑ R. Liive, "Maanteeamet on teedele lubanud kaks isejuhtivat sõidukit”
- ↑ V. Filonenko, „Беспилотные автомобили получат особые права“
- ↑ A. Tšernogorov, „Нам нужно менять законодательство для беспилотных авто“
- ↑ A. Smirnov, „Власти никогда не разрешат полностью беспилотные автомобили“
- ↑ R. Yankovski, J. Bekljanko, J. Iriskina, „Будущее беспилотников: мифы и этический выбор“
- ↑ J. Ljaštšenko, Актуальные проблемы авиации и космонавтики. Правовой аспект использования беспилотных аппаратов в России, lk 612-614
- ↑ O. Aksamentov, „Беспилотникам подрезали крылья: вступил в силу обновленный Воздушный кодекс“
- ↑ M.Kyriakidis, Transportation Research Part F: Traffic Psychology and Behaviour, 2015, Public opinion on automated driving: Results of an international questionnaire among 5000 respondents. Abstract.
- ↑ Nathalie Nevejans, Study on European Civil Law Rules in Robotics, PE 571.379, Euroopa Liit, 2016.
- ↑ The Conversation, "Redefining ‘safety’ for self-driving cars", November 28, 2017
- ↑ LA Times, "Tesla car on Autopilot warned driver 7 times before fatal crash, safety regulator says", June 20, 2017
- ↑ MIT News, "Predicting people's driving personalities", November 18, 2019
- ↑ CNET, "5G could make self-driving cars smarter and commutes safer", August 27, 2019
- ↑ [ https://courses.cs.ut.ee/2020/Tehisintellekti_algkursus/spring/Main/PARTIVise?fbclid=IwAR1L4XxLfMHNAuuS16e8WS6_gpLbahrJsfq5tImzAx59mKzSAgjCgMM55wo]
- ↑ [6]
Muud allikad
- http://moralmachine.mit.edu/
- https://www.nature.com/articles/d41586-018-07135-0
- https://www.theverge.com/2018/10/24/18013392/self-driving-car-ethics-dilemma-mit-study-moral-machine-results
- https://www.roboticsbusinessreview.com/unmanned/unmanned-ground/infographic-can-self-driving-cars-make-moral-decisions/
- https://phys.org/news/2019-01-self-driving-cars-moral.html
- https://www.newyorker.com/science/elements/a-study-on-driverless-car-ethics-offers-a-troubling-look-into-our-values
- https://www.nvidia.com/en-us/self-driving-cars/drive-labs/
- https://www.sciencedirect.com/science/article/pii/S0968090X15003447
- https://en.wikipedia.org/wiki/Self-driving_car
- https://www.pocket-lint.com/cars/news/143955-sae-autonomous-driving-levels-explained
- https://www.synopsys.com/automotive/autonomous-driving-levels.html
- https://en.wikipedia.org/wiki/History_of_self-driving_cars

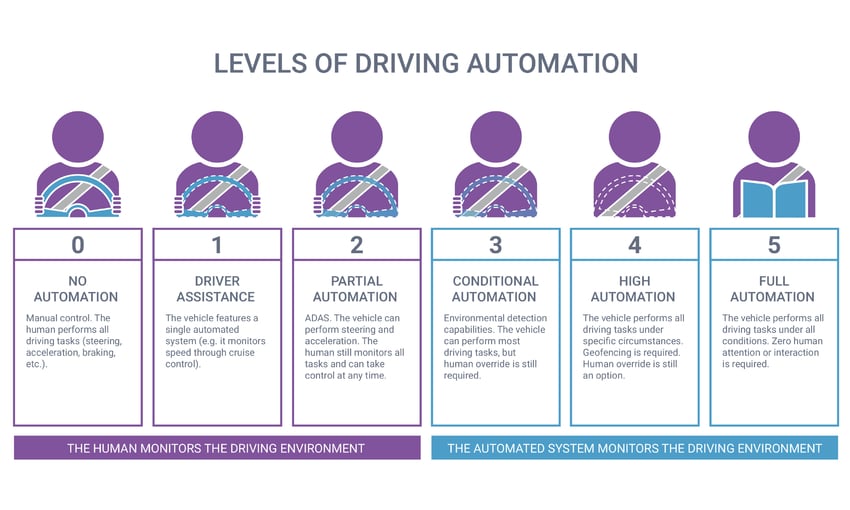{kind=link}