Masinnägemine ja selle rakendamine kaasaegses maailmas: Difference between revisions
| (51 intermediate revisions by 2 users not shown) | |||
| Line 1: | Line 1: | ||
'''Masinnägemine''' - on teaduslik suund tehisintellekti, eelkõige robootika ja sellega seotud tehnoloogiate valdkonnas reaalse maailma objektide kujutiste saamiseks, nende töötlemiseks ja saadud andmete kasutamiseks mitmesuguste rakenduslike probleemide lahendamiseks. | '''Masinnägemine''' - on teaduslik suund tehisintellekti, eelkõige robootika ja sellega seotud tehnoloogiate valdkonnas reaalse maailma objektide kujutiste saamiseks, nende töötlemiseks ja saadud andmete kasutamiseks mitmesuguste rakenduslike probleemide lahendamiseks. <ref name="machine structure">Machine Vision : Theory, Algorithms, Practicalities - Morgan Kaufmann, 2004</ref> | ||
[[File:Glaz.jpg|500px|right|thumb|Masinnägemine.|link=https://habr.com/ru/post/350918/]] | [[File:Glaz.jpg|500px|right|thumb|Masinnägemine. <ref name="pic1">https://habr.com/ru/post/350918/</ref>|link=https://habr.com/ru/post/350918/]] | ||
| Line 10: | Line 10: | ||
== Masinnägemise arengu ajalugu ja see, mis meil praegu on == | == Masinnägemise arengu ajalugu ja see, mis meil praegu on == | ||
'''1950. aastatel''' oli teadusmaailmas palju vaidlusi tehisintellektiga masina tegemise võimalikkusest. Masina ülesanneteks sai ümbritseva maailma tajumine ja otsuste tegemine nähtud informatsiooni põhjal. | '''1950. aastatel''' oli teadusmaailmas palju vaidlusi tehisintellektiga masina tegemise võimalikkusest. Masina ülesanneteks sai ümbritseva maailma tajumine ja otsuste tegemine nähtud informatsiooni põhjal. | ||
Esimest sammu tegi Massachusettsi Tehnoloogiainstituudi (MIT) professor Oliver Selfridge, kes 1955. aastal avaldas artikli "Mustrituvastus ja kaasaegsed arvutid". See esitas idee varustada arvutid video- ja helisüsteemidega, ning tõi kaasa masinnägemise suuna tekkimise. <ref> | Esimest sammu tegi Massachusettsi Tehnoloogiainstituudi (MIT) professor Oliver Selfridge, kes 1955. aastal avaldas artikli "Mustrituvastus ja kaasaegsed arvutid". See esitas idee varustada arvutid video- ja helisüsteemidega, ning tõi kaasa masinnägemise suuna tekkimise. <ref> Aleksei Šalaginov, Arvutinägemise ajalugu / Aleksei Šalaginov. - Tekst: elektrooniline // shalaginov.com: [sait]. - URL: https://shalaginov.com/2020/05/16/computer-vision-history/.</ref> | ||
Uue suuna | Uue suuna ülesanneks oli seletada masinatele kolmemõõtmelise maailma kahemõõtmelise projektsiooni abil. See tähendas, et objekti kohta täieliku teabe saamiseks on vaja mitte ainult kaamerast pilti, vaid ka lisaandmeid. | ||
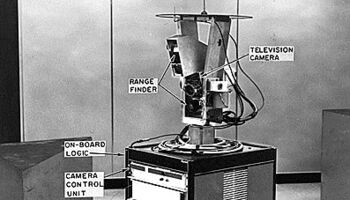
[[File:History_Masinnägemine.jpg|350px|right|thumb| | [[File:History_Masinnägemine.jpg|350px|right|thumb|Esimene masinnägemise võimaldav kaamera.<ref name="зшс2">https://www.timetoast.com/timelines/5798d398-efa1-481a-b0db-80c02f9231d2</ref>|link=https://www.timetoast.com/timelines/5798d398-efa1-481a-b0db-80c02f9231d2]] | ||
Lisaandmete saamiseks kasutati erinevaid meetodeid: | |||
* Kaamera liikumine; | * Kaamera liikumine; | ||
* | * Mitme kaameraid kasutavad süsteemid; | ||
* Kahe kaamera kasutamine (stereopaarid); | * Kahe kaamera kasutamine (stereopaarid); | ||
* Erinevad algoritmid saadud pildi töötlemiseks | * Erinevad algoritmid saadud pildi töötlemiseks. | ||
'''1960 aastate alguseni''' olid kõik varem toodud arendused pigem teoreetilised, kuna varem ei olnud tehnikat, mis võimaldas masinnägemise algoritme täielikult katsetada ja selle abil otsusi teha. | '''1960 aastate alguseni''' olid kõik varem toodud arendused pigem teoreetilised, kuna varem ei olnud tehnikat, mis võimaldas masinnägemise algoritme täielikult katsetada ja selle abil otsusi teha. | ||
Esimesed pilditöötlussüsteemid ilmusid 1960. aastatel. Enamik neist süsteemidest olid loodud fotodelt segaduse eemaldamiseks. Ilmusid esimesed uuringud trükitähtede äratundmise alal. | Esimesed pilditöötlussüsteemid ilmusid 1960. aastatel. Enamik neist süsteemidest olid loodud fotodelt segaduse eemaldamiseks. Ilmusid esimesed uuringud trükitähtede äratundmise alal. | ||
'''90-ndate''' algus on modulaarse paradigma tekkimise aeg. Neuroteadlane David Courtney Marr uuris inimese nägemist ja tuvastas neli andmetöötlusetappi: | '''70-ndatel''' MIT-i magistrant Lawrence Robberts pakkus välja, et masin võiks kahemõõtmelistest kujutistest ehitada objektidest kolmemõõtmelisi kujutisi. | ||
* Piltide teisendamine; | 1979. aastal ilmus lava dünaamilise analüüsi teooria. See võimaldas ära tunda liikuvaid objekte, ning põhines Hamburgi ülikooli professori Hans Hellmut Nageli masinnägemise valdkonna töödel. <ref name="history2">Pavel Bryzgalov, Masinnägemise arengu ajalugu / Bryzgalov Pavel. - Tekst: elektrooniline // robome.ru: [sait]. - URL: http://robome.ru/istorija_razvitija_tehnicheskogo_zrenija/ .</ref> | ||
'''90-ndate''' algus on modulaarse paradigma tekkimise aeg. Neuroteadlane David Courtney Marr uuris inimese nägemist ja tuvastas neli andmetöötlusetappi: | |||
* Piltide teisendamine; | |||
* Segmenteerimine; | * Segmenteerimine; | ||
| Line 38: | Line 40: | ||
* Geomeetrilise struktuuri valik; | * Geomeetrilise struktuuri valik; | ||
* Suhtelise struktuuri ja semantika määramine. | * Suhtelise struktuuri ja semantika määramine. | ||
Ta määratles ka kolm andmetöötluse taset: | Ta määratles ka kolm andmetöötluse taset: | ||
* | * Madal tase. See filtreerib müra. | ||
* Keskmine tase. Sellel tasemel toimub segmenteerimine. | * Keskmine tase. Sellel tasemel toimub segmenteerimine. | ||
* | * Kõrge tase. Sellel tasemel on konkreetsed objektid seotud maailmapildiga. <ref> Aleksei Šalaginov, Arvutinägemise ajalugu / Aleksei Šalaginov. - Tekst: elektrooniline // shalaginov.com: [sait]. - URL: https://shalaginov.com/2020/05/16/computer-vision-history/.</ref> | ||
Hetkel on masinnägemine täielikult väljakujunenud küberneetika haru. Selle valdkonna uurimisele ja arendamisele on pühendatud palju konverentse, ning sellel teemal kirjutatakse raamatuid ja artikle. | Hetkel on masinnägemine täielikult väljakujunenud küberneetika haru. Selle valdkonna uurimisele ja arendamisele on pühendatud palju konverentse, ning sellel teemal kirjutatakse raamatuid ja artikle. | ||
== Kuidas masinnägemine töötab == | == Kuidas masinnägemine töötab? == | ||
Selleks, et arvuti teatud objektid üles leiaks, tuleb seda talle õpetada. Selleks koostatakse tohutu | Selleks, et arvuti teatud objektid üles leiaks, tuleb seda talle õpetada. Selleks koostatakse tohutu koolitusnäidiseid. | ||
Näiteks | Näiteks fotod, millest osa sisaldab soovitud objekti ja teine osa mitte. Järgmiseks tuleb masinõpe. | ||
Arvuti analüüsib | Arvuti analüüsib saadud pilte ja seejärel teeb kindlaks, millised kujutiste kombinatsioonide tunnused näitavad soovitud objektide olemasolu, | ||
ja arvutab nende olulisuse. Kui see on lõpetatud, saab masinnägemist kasutada. | ja arvutab nende olulisuse. Kui see etapp on lõpetatud, saab masinnägemist kasutada. | ||
Arvuti jaoks on pilt pikslite kogum, millest igaühel on oma heleduse või värvi väärtus. Selleks, et masin saaks pildi sisust | Arvuti jaoks on pilt pikslite kogum, millest igaühel on oma heleduse või värvi väärtus. Selleks, et masin saaks pildi sisust aru, töödeldakse seda spetsiaalsete algoritmide abil. | ||
Esmalt tehakse kindlaks suured olulised kohad. Seda saab teha mitmel viisil. Näiteks | Esmalt tehakse kindlaks suured olulised kohad. Seda saab teha mitmel viisil. Näiteks liigutades mitu korda sarnast pilti Gaussi häguga, kasutades erinevaid hägususraadiusi. | ||
Seejärel võrreldakse tulemusi omavahel, et | Seejärel võrreldakse tulemusi omavahel, et leida kõige kontrastsemad alad. Pärast oluliste kohtade leidmist kirjeldab arvuti neid numbritega. | ||
Pildi fragmendi numbrilisel kujul salvestamist nimetatakse deskriptoriks. Deskriptorite abil | Pildi fragmendi numbrilisel kujul salvestamist nimetatakse deskriptoriks. Deskriptorite abil saab üsna täpselt võrrelda pildi fragmente, ilma fragmente kasutamata. | ||
Arvutuste kiirendamiseks jaotab arvuti deskriptorid rühmadesse, saades omamoodi klastri. Sarnased deskriptorid erinevatelt piltidelt kuuluvad samasse klastrisse. | Arvutuste kiirendamiseks jaotab arvuti deskriptorid rühmadesse, saades omamoodi klastri. Sarnased deskriptorid erinevatelt piltidelt kuuluvad samasse klastrisse. | ||
Pärast sellist klasterdamist muutub oluliseks ainult klastri number koos deskriptoritega . Mis on pakutavaga kõige sarnasem. Deskriptorist klastri numbrini jõudmist nimetatakse kvantiseerimiseks. | Pärast sellist klasterdamist muutub oluliseks ainult klastri number koos deskriptoritega. Mis on pakutavaga kõige sarnasem. Deskriptorist klastri numbrini jõudmist nimetatakse kvantiseerimiseks. | ||
Ja klastri numbrit ennast nimetatakse kvantdeskriptoriks. Kvantimine vähendab oluliselt andmete hulka, mida arvuti peab töötlema. Kvantdeskriptorite põhjal saab arvuti pilte võrrelda ja neil olevaid objekte ära tunda. Arvuti võrdleb erinevate piltide kvant deskriptorite komplekte ja teeb järelduse, kui palju | Ja klastri numbrit ennast nimetatakse kvantdeskriptoriks. Kvantimine vähendab oluliselt andmete hulka, mida arvuti peab töötlema. Kvantdeskriptorite põhjal saab arvuti pilte võrrelda ja neil olevaid objekte ära tunda. Arvuti võrdleb erinevate piltide kvant deskriptorite komplekte ja teeb järelduse, kui palju neid või nende üksikud fragmendid on sarnased. Sellist võrdlust pildi järgi kasutavad ka otsingumootorid piltide leidmiseks.<ref name="workingpr">Inishev, Kuidas arvutinägemine töötab? / Inišev. - Tekst: elektrooniline // habr.com: [sait]. - URL: https://habr.com/ru/company/droider/blog/538750/.</ref> | ||
== Masinnägemise rakendamine == | == Masinnägemise rakendamine == | ||
| Line 70: | Line 71: | ||
'''Telefooni kaamera rakendamine masinnägemises (Photomath näitel)''' | '''Telefooni kaamera rakendamine masinnägemises (Photomath näitel)''' | ||
[[File:Photomath.jpg|330px|right|thumb|Photomath.|link=https://www.google.com/url?sa=i&url=https%3A%2F%2Fmicroblink.com%2Fuse-cases%2Fcase-studies%2Fmath-education-powered-by-mobile-vision-photomath&psig=AOvVaw1qmveqCHSNgpCZFuLGr865&ust=1638719180924000&source=images&cd=vfe&ved=0CAsQjRxqFwoTCPjJ577ByvQCFQAAAAAdAAAAABAD]] | [[File:Photomath.jpg|330px|right|thumb|Photomath. <ref name="pic4">https://www.google.com/url?sa=i&url=https%3A%2F%2Fmicroblink.com%2Fuse-cases%2Fcase-studies%2Fmath-education-powered-by-mobile-vision-photomath&psig=AOvVaw1qmveqCHSNgpCZFuLGr865&ust=1638719180924000&source=images&cd=vfe&ved=0CAsQjRxqFwoTCPjJ577ByvQCFQAAAAAdAAAAABAD</ref>|link=https://www.google.com/url?sa=i&url=https%3A%2F%2Fmicroblink.com%2Fuse-cases%2Fcase-studies%2Fmath-education-powered-by-mobile-vision-photomath&psig=AOvVaw1qmveqCHSNgpCZFuLGr865&ust=1638719180924000&source=images&cd=vfe&ved=0CAsQjRxqFwoTCPjJ577ByvQCFQAAAAAdAAAAABAD]] | ||
PhotoMath on tasuta rakendus, mis töötati välja kui tööriist matemaatiliste võrrandite lahendamiseks, mis põhineb mobiilseadme kaamera andmetuvastus tehnoloogial(OCR). Võrrandi arvutamiseks pole vaja teha mitte rohkem, kui suunata nutitelefoni kaamera ülesandele, vajadusel parandada võrrandit appi sees ja mõne hetke pärast telefoni ekraanil ilmub lahenduskäik koos vastusega. Rakendus suudab ülesandeid skaneerida nii paberilt kui ka ekraanilt. Sellel rakendusel on ka hariv osa, mis seisneb selles, et rakendus ei anna mitte ainult õiget vastust, vaid võimaldab vaadata ka kõiki matemaatilise võrrandi lahendamise etappe ja niimoodi õppida. | PhotoMath on tasuta rakendus, mis töötati välja kui tööriist matemaatiliste võrrandite lahendamiseks, mis põhineb mobiilseadme kaamera andmetuvastus tehnoloogial(OCR). Võrrandi arvutamiseks pole vaja teha mitte rohkem, kui suunata nutitelefoni kaamera ülesandele, vajadusel parandada võrrandit appi sees ja mõne hetke pärast telefoni ekraanil ilmub lahenduskäik koos vastusega. Rakendus suudab ülesandeid skaneerida nii paberilt kui ka ekraanilt. Sellel rakendusel on ka hariv osa, mis seisneb selles, et rakendus ei anna mitte ainult õiget vastust, vaid võimaldab vaadata ka kõiki matemaatilise võrrandi lahendamise etappe ja niimoodi õppida. <ref name="camera">Kasutaja: nokiaman, Arendaja lood: PhotoMath by MicroBlink / nokiaman :. - Tekst: elektrooniline // habr.com: [sait]. - URL: https://habr.com/ru/company/microsoftlumia/blog/248789/.</ref> | ||
---- | ---- | ||
| Line 83: | Line 84: | ||
'''Tark linn''' | '''Tark linn''' | ||
Tark linn on ka üks masinnägemise arendamise harudest, nimelt sellise idee ellu viimine on seotud vajadusega tagada lähitulevikus inimeste kaasaegne | Tark linn on ka üks masinnägemise arendamise harudest, nimelt sellise idee ellu viimine on seotud vajadusega tagada lähitulevikus inimeste kaasaegne elukvaliteedi uuenduslike tehnoloogiate kasutamise kaudu. Sellise linna sees olevad süsteemid tagavad linnaelu süsteemide säästliku, keskkonnasõbraliku ja ohutu kasutamist. | ||
---- | ---- | ||
| Line 89: | Line 90: | ||
'''Nutikas valgusfoor''' | '''Nutikas valgusfoor''' | ||
"Nutikas valgusfoor" on dünaamiline fooride haldussüsteem, tänu millele paraneb liiklusvoogude liiklusvõime. Tihti valgusfoorides määratakse punaste ja roheliste signaalide muutus kindlaks kehtestatud ajakava järgi. Nutikas valgusfoor kasutab signaalide muutmiseks kaameraid. Tavalistes linnades kohtame sageli olukorda, kus seisame punase tule taga, samal ajal kui külgsuunas kedagi pole. Kui nutikas valgusfoor näeb, et ühes suunas liigub palju vähem autosid kui teistes, siis liikumise optimeerimiseks lülitab rohelist värvi ülekoormatud suundadel pikemalt. Just see parandab liikumise vooge ja vähendab mõju autode heitgaasidest keskkonnale. | "Nutikas valgusfoor" on dünaamiline fooride haldussüsteem, tänu millele paraneb liiklusvoogude liiklusvõime. Tihti valgusfoorides määratakse punaste ja roheliste signaalide muutus kindlaks kehtestatud ajakava järgi. Nutikas valgusfoor kasutab signaalide muutmiseks kaameraid. Tavalistes linnades kohtame sageli olukorda, kus seisame punase tule taga, samal ajal kui külgsuunas kedagi pole. Kui nutikas valgusfoor näeb, et ühes suunas liigub palju vähem autosid kui teistes, siis liikumise optimeerimiseks lülitab rohelist värvi ülekoormatud suundadel pikemalt. Just see parandab liikumise vooge ja vähendab mõju autode heitgaasidest keskkonnale. <ref name="trafficlights">drosselmayer Evolution of smart traffic lights / drosselmayer. — Tekst : elektrooniline // habr.com : [sait]. — URL: https://habr.com/ru/post/125282/</ref><ref name="trafficlights2">Tott Smart Traffic Lights / Tott. — Tekst : elekrooniline // habr.com : [sait]. — URL: https://habr.com/ru/post/553162/ .</ref> | ||
---- | ---- | ||
[[File:Robodog.jpg|330px|left|thumb|Boston Dynamics Spot, robot koer.|link=https://www.google.com/url?sa=i&url=https%3A%2F%2Fwww.silicon.co.uk%2Fe-innovation%2Fresearch%2Frobot-spot-boston-dynamics-345787&psig=AOvVaw04BHft5kYiqPv-xms-4pwc&ust=1638719798447000&source=images&cd=vfe&ved=0CAsQjRxqFwoTCIDk5PjByvQCFQAAAAAdAAAAABAd]] | [[File:Robodog.jpg|330px|left|thumb|Boston Dynamics Spot, robot koer. <ref name="зшс3">https://www.google.com/url?sa=i&url=https%3A%2F%2Fwww.silicon.co.uk%2Fe-innovation%2Fresearch%2Frobot-spot-boston-dynamics-345787&psig=AOvVaw04BHft5kYiqPv-xms-4pwc&ust=1638719798447000&source=images&cd=vfe&ved=0CAsQjRxqFwoTCIDk5PjByvQCFQAAAAAdAAAAABAd</ref>|link=https://www.google.com/url?sa=i&url=https%3A%2F%2Fwww.silicon.co.uk%2Fe-innovation%2Fresearch%2Frobot-spot-boston-dynamics-345787&psig=AOvVaw04BHft5kYiqPv-xms-4pwc&ust=1638719798447000&source=images&cd=vfe&ved=0CAsQjRxqFwoTCIDk5PjByvQCFQAAAAAdAAAAABAd]] | ||
'''Robotite ehitus (Boston Dynamics robot koera näitel)''' | '''Robotite ehitus (Boston Dynamics robot koera näitel)''' | ||
2020. aasta mai kuus tuli välja Boston Dynamics robot koer (Spot) Singapuri tänavatele, et jälgida sotsiaalset distantseerumist COVID-19 ajal. Spot suudab trepist üles ronida ja konarlikul maastikul liikuda, kuid on siiski piisavalt väike siseruumides kasutamiseks. Spot suudab saavutada kiirust kuni 5,76 km/h ja töötada autonoomselt kuni 90 minutit. Robot on varustatud stereo kaamerate süsteemiga, mis annavad sellele 360° vaate. Selline kaamerate süsteem põhineb masinnägemisel ja aitab roobotil ruumis navigeerida ja võimaldab otsusi tegema kasutades programmeeritud algoritme. | 2020. aasta mai kuus tuli välja Boston Dynamics robot koer (Spot) Singapuri tänavatele, et jälgida sotsiaalset distantseerumist COVID-19 ajal. Spot suudab trepist üles ronida ja konarlikul maastikul liikuda, kuid on siiski piisavalt väike siseruumides kasutamiseks. Spot suudab saavutada kiirust kuni 5,76 km/h ja töötada autonoomselt kuni 90 minutit. Robot on varustatud stereo kaamerate süsteemiga, mis annavad sellele 360° vaate. Selline kaamerate süsteem põhineb masinnägemisel ja aitab roobotil ruumis navigeerida ja võimaldab otsusi tegema kasutades programmeeritud algoritme. <ref name="BostonDynamics">BostonDynamics Robot-Dog / BostonDynamics. — Текст : электронный // www.bostondynamics.com : [сайт]. — URL: https://www.bostondynamics.com/ .</ref> | ||
---- | ---- | ||
| Line 109: | Line 109: | ||
Keevitustööde kontroll ja keevitus protsessi automatiseerimine; | Keevitustööde kontroll ja keevitus protsessi automatiseerimine; | ||
Logistika - toodete oleku ja koguse kontroll | Logistika - toodete oleku ja koguse kontroll | ||
Pildistamine ohtlikes või raskesti ligipääsetavates kohtades | Pildistamine ohtlikes või raskesti ligipääsetavates kohtades <ref name="indastrial"> https://nirmech.ru/ : [sait]. — URL: https://nirmech.ru/</ref> | ||
---- | ---- | ||
| Line 115: | Line 115: | ||
'''Sõjaväe droonid (Maven tehnoloogia näitel)''' | '''Sõjaväe droonid (Maven tehnoloogia näitel)''' | ||
2017. aastal Google koostöös USA kaitseministeeriumiga on alustanud projekti Maven, mille raames on plaanis rakendada täiustatud arvutialgoritme objektide tuvastamiseks suurel hulgal liikuvatel või liikumatutel piltidel. Tegelikult on see sõjaväe droonide masinnägemissüsteem. Süsteemi kasutades droonidest saab tuvastada sõidukeid ja muid objekte, jälgida nende liikumist ja edastada tuvastamise tulemused kaitseministeeriumile. | 2017. aastal Google koostöös USA kaitseministeeriumiga on alustanud projekti Maven, mille raames on plaanis rakendada täiustatud arvutialgoritme objektide tuvastamiseks suurel hulgal liikuvatel või liikumatutel piltidel. Tegelikult on see sõjaväe droonide masinnägemissüsteem. Süsteemi kasutades droonidest saab tuvastada sõidukeid ja muid objekte, jälgida nende liikumist ja edastada tuvastamise tulemused kaitseministeeriumile. <ref name="military drones">Alizar, Military drones / alizar. — Tekst : elektrooniline // habr.com : [sait]. — URL: https://habr.com/ru/post/411323/ .</ref> | ||
---- | ---- | ||
| Line 124: | Line 124: | ||
'''Line Assistant''' | '''Line Assistant''' | ||
[[File:Line_assistant.jpg|500px|right|thumb|Line Assistant.|link=https://www.usedvwaudi.com/blog/2019/04/16/what-is-lane-assist--technology-and-how-does-it-work]] | [[File:Line_assistant.jpg|500px|right|thumb|Line Assistant. <ref name="pic6">https://www.usedvwaudi.com/blog/2019/04/16/what-is-lane-assist--technology-and-how-does-it-work</ref>|link=https://www.usedvwaudi.com/blog/2019/04/16/what-is-lane-assist--technology-and-how-does-it-work]] | ||
See on tehnoloogia, mis kasutab WAG autodes sisseehitatud kaamerat, mis jälgib, et auto liigub oma sõidurajal | See on tehnoloogia, mis kasutab WAG autodes sisseehitatud kaamerat, mis jälgib, et auto liigub oma sõidurajal. See kaamera asub sisemises tahavaatepeeglis, ning suudab juhtida auto liikumist, jälgides teemärgistust ja reguleerides auto asendit nende märgiste suhtes. | ||
Mis on hea selles süsteemis juhul, kui juhi tähelepanu hajub ja auto teel olevatest rajamärgistest eemale viib, alustab Lane Assist parandusmeetmeid, mis lõppkokkuvõttes vähendab pikkadel sõitudel sõidurajalt välja triivimise tõenäosust. | Mis on hea selles süsteemis - juhul, kui juhi tähelepanu hajub ja auto teel olevatest rajamärgistest eemale viib, alustab Lane Assist parandusmeetmeid, mis lõppkokkuvõttes vähendab pikkadel sõitudel sõidurajalt välja triivimise tõenäosust. <ref name="line-asistant">Volkswagen Lane Assist / Volkswagen. - Tekst: elektrooniline // vw.avto-city.ru: [sait]. - URL: https://vw.avto-city.ru/models/preimushchestva/obzor/elektronnyy-pomoshchnik-lane-assist/ .</ref> | ||
'''Front Light Assistant''' | '''Front Light Assistant''' | ||
Front Light Assist kasutatakse sõiduki kaugtulede automaatseks sisse- või väljalülitamiseks. Kui auto seisab, töötavad ainult lähituled, kuid kui auto sõidab pimedas üle 60 km/h, lülitab FLA-süsteem vastutuleva liikluse puudumisel automaatselt sisse kaugtuled. Tahavaatepeeglis olev kaamera jälgib liiklust. Tema abiga tunneb süsteem ära vastutulevad ja samas suunas sõiduki ees liikujad ning lülitub automaatselt tagasi lähituledele. | |||
Front Light Assist kasutatakse sõiduki kaugtulede automaatseks sisse- või väljalülitamiseks. Kui auto seisab, töötavad ainult lähituled, kuid kui auto sõidab pimedas üle 60 km/h, lülitab FLA-süsteem vastutuleva liikluse puudumisel automaatselt sisse kaugtuled. Tahavaatepeeglis olev kaamera jälgib liiklust. Tema abiga tunneb süsteem ära vastutulevad ja samas suunas sõiduki ees liikujad ning lülitub automaatselt tagasi lähituledele. <ref name="line-asistant2">Mark Icons, Kõik Volkswageni autode elektrooniliste abiliste kohta / Icons Mark. - Tekst: elektrooniline // vagdrive.com: [sait]. - URL: https://vagdrive.com/threads/vse-ob-ehlektronnyx-pomoschnikax-avtomobilej-koncerna-volkswagen.1198/ .</ref> | |||
'''Tesla Autopilot''' | '''Tesla Autopilot''' | ||
Kõikidel uutel Tesla autodel on olemas riistvara, mida on vaja tulevikus täielikuks isejuhtimiseks peaaegu kõikides tingimustes. Süsteem on konstrueeritud nii, et see suudab sooritada lühikesi ja pikki sõite ilma, et juhiistmel istuja oleks midagi vaja. Tesla Motors | |||
Kõikidel uutel Tesla autodel on olemas riistvara, mida on vaja tulevikus täielikuks isejuhtimiseks peaaegu kõikides tingimustes. Süsteem on konstrueeritud nii, et see suudab sooritada lühikesi ja pikki sõite ilma, et juhiistmel istuja oleks midagi vaja teha. Tesla Motors hakkas loobuma radaaridest tema autodes. Selle asemel töötas ettevõte välja Tesla Visioni kaamerasüsteemil põhineva autopiloodi versiooni. <ref name="tesla">Tesla autopiloot / Tesla. - Tekst: elektrooniline // www.tesla.com: [sait]. - URL: https://www.tesla.com/autopilot .</ref> | |||
== Allikad == | == Allikad == | ||
Latest revision as of 23:11, 5 December 2021
Masinnägemine - on teaduslik suund tehisintellekti, eelkõige robootika ja sellega seotud tehnoloogiate valdkonnas reaalse maailma objektide kujutiste saamiseks, nende töötlemiseks ja saadud andmete kasutamiseks mitmesuguste rakenduslike probleemide lahendamiseks. [1]
Sissejuhatus
Masinnägemine on arvutinägemise rakendamine tööstuses ja tootmises. Kui arvutinägemine on levinud tehnikate kogum, mis võimaldab arvutitel näha, siis masinnägemise jaoks huvipakkuvaks valdkonnaks on digitaalsed sisend-/väljundseadmed ja arvutivõrgud, mis on loodud tootmisseadmete, näiteks robotmanipulaatorite või otsimismasinate juhtimiseks. Masinnägemine on inseneriteaduse alajaotus, mis on seotud andmetöötluse, optika, masinaehituse ja tööstusautomaatikaga. Üks levinumaid masinnägemisrakendusi on tööstustoodete, nagu pooljuhtkiibid, autod, toit ja ravimid, kontrollimine. Varem koosteliinidel töötasid inimesed, kes uurisid toodete osi, tehes järeldusi töötluse kvaliteedi kohta. Nüüd aga masinnägemissüsteemid saavad seda teha, ning kasutavad selleks digitaalseid ja nutikaameraid koos tarkvaraga.
Masinnägemise arengu ajalugu ja see, mis meil praegu on
1950. aastatel oli teadusmaailmas palju vaidlusi tehisintellektiga masina tegemise võimalikkusest. Masina ülesanneteks sai ümbritseva maailma tajumine ja otsuste tegemine nähtud informatsiooni põhjal. Esimest sammu tegi Massachusettsi Tehnoloogiainstituudi (MIT) professor Oliver Selfridge, kes 1955. aastal avaldas artikli "Mustrituvastus ja kaasaegsed arvutid". See esitas idee varustada arvutid video- ja helisüsteemidega, ning tõi kaasa masinnägemise suuna tekkimise. [3]
Uue suuna ülesanneks oli seletada masinatele kolmemõõtmelise maailma kahemõõtmelise projektsiooni abil. See tähendas, et objekti kohta täieliku teabe saamiseks on vaja mitte ainult kaamerast pilti, vaid ka lisaandmeid.
Lisaandmete saamiseks kasutati erinevaid meetodeid:
- Kaamera liikumine;
- Mitme kaameraid kasutavad süsteemid;
- Kahe kaamera kasutamine (stereopaarid);
- Erinevad algoritmid saadud pildi töötlemiseks.
1960 aastate alguseni olid kõik varem toodud arendused pigem teoreetilised, kuna varem ei olnud tehnikat, mis võimaldas masinnägemise algoritme täielikult katsetada ja selle abil otsusi teha.
Esimesed pilditöötlussüsteemid ilmusid 1960. aastatel. Enamik neist süsteemidest olid loodud fotodelt segaduse eemaldamiseks. Ilmusid esimesed uuringud trükitähtede äratundmise alal.
70-ndatel MIT-i magistrant Lawrence Robberts pakkus välja, et masin võiks kahemõõtmelistest kujutistest ehitada objektidest kolmemõõtmelisi kujutisi.
1979. aastal ilmus lava dünaamilise analüüsi teooria. See võimaldas ära tunda liikuvaid objekte, ning põhines Hamburgi ülikooli professori Hans Hellmut Nageli masinnägemise valdkonna töödel. [5]
90-ndate algus on modulaarse paradigma tekkimise aeg. Neuroteadlane David Courtney Marr uuris inimese nägemist ja tuvastas neli andmetöötlusetappi:
- Piltide teisendamine;
- Segmenteerimine;
- Geomeetrilise struktuuri valik;
- Suhtelise struktuuri ja semantika määramine.
Ta määratles ka kolm andmetöötluse taset:
- Madal tase. See filtreerib müra.
- Keskmine tase. Sellel tasemel toimub segmenteerimine.
- Kõrge tase. Sellel tasemel on konkreetsed objektid seotud maailmapildiga. [6]
Hetkel on masinnägemine täielikult väljakujunenud küberneetika haru. Selle valdkonna uurimisele ja arendamisele on pühendatud palju konverentse, ning sellel teemal kirjutatakse raamatuid ja artikle.
Kuidas masinnägemine töötab?
Selleks, et arvuti teatud objektid üles leiaks, tuleb seda talle õpetada. Selleks koostatakse tohutu koolitusnäidiseid. Näiteks fotod, millest osa sisaldab soovitud objekti ja teine osa mitte. Järgmiseks tuleb masinõpe. Arvuti analüüsib saadud pilte ja seejärel teeb kindlaks, millised kujutiste kombinatsioonide tunnused näitavad soovitud objektide olemasolu, ja arvutab nende olulisuse. Kui see etapp on lõpetatud, saab masinnägemist kasutada.
Arvuti jaoks on pilt pikslite kogum, millest igaühel on oma heleduse või värvi väärtus. Selleks, et masin saaks pildi sisust aru, töödeldakse seda spetsiaalsete algoritmide abil. Esmalt tehakse kindlaks suured olulised kohad. Seda saab teha mitmel viisil. Näiteks liigutades mitu korda sarnast pilti Gaussi häguga, kasutades erinevaid hägususraadiusi. Seejärel võrreldakse tulemusi omavahel, et leida kõige kontrastsemad alad. Pärast oluliste kohtade leidmist kirjeldab arvuti neid numbritega. Pildi fragmendi numbrilisel kujul salvestamist nimetatakse deskriptoriks. Deskriptorite abil saab üsna täpselt võrrelda pildi fragmente, ilma fragmente kasutamata. Arvutuste kiirendamiseks jaotab arvuti deskriptorid rühmadesse, saades omamoodi klastri. Sarnased deskriptorid erinevatelt piltidelt kuuluvad samasse klastrisse. Pärast sellist klasterdamist muutub oluliseks ainult klastri number koos deskriptoritega. Mis on pakutavaga kõige sarnasem. Deskriptorist klastri numbrini jõudmist nimetatakse kvantiseerimiseks. Ja klastri numbrit ennast nimetatakse kvantdeskriptoriks. Kvantimine vähendab oluliselt andmete hulka, mida arvuti peab töötlema. Kvantdeskriptorite põhjal saab arvuti pilte võrrelda ja neil olevaid objekte ära tunda. Arvuti võrdleb erinevate piltide kvant deskriptorite komplekte ja teeb järelduse, kui palju neid või nende üksikud fragmendid on sarnased. Sellist võrdlust pildi järgi kasutavad ka otsingumootorid piltide leidmiseks.[7]
Masinnägemise rakendamine
Telefooni kaamera rakendamine masinnägemises (Photomath näitel)

PhotoMath on tasuta rakendus, mis töötati välja kui tööriist matemaatiliste võrrandite lahendamiseks, mis põhineb mobiilseadme kaamera andmetuvastus tehnoloogial(OCR). Võrrandi arvutamiseks pole vaja teha mitte rohkem, kui suunata nutitelefoni kaamera ülesandele, vajadusel parandada võrrandit appi sees ja mõne hetke pärast telefoni ekraanil ilmub lahenduskäik koos vastusega. Rakendus suudab ülesandeid skaneerida nii paberilt kui ka ekraanilt. Sellel rakendusel on ka hariv osa, mis seisneb selles, et rakendus ei anna mitte ainult õiget vastust, vaid võimaldab vaadata ka kõiki matemaatilise võrrandi lahendamise etappe ja niimoodi õppida. [9]
Meelelahutus ja filmitööstus
Meelelahutuse ja filmitööstuse sfääris kasutakse masiinnägemist VR/AR-sisu mahulise jäädvustamiseks, liitreaalsuse animatsiooni kasutavate külastajatega suhtlemiseks ja leidub veelgi rohkem kasutus võimalusi. Ilma masinnägemise kaamerateta VR lahendused ei suuda üksteisega sünkroonida.
Tark linn
Tark linn on ka üks masinnägemise arendamise harudest, nimelt sellise idee ellu viimine on seotud vajadusega tagada lähitulevikus inimeste kaasaegne elukvaliteedi uuenduslike tehnoloogiate kasutamise kaudu. Sellise linna sees olevad süsteemid tagavad linnaelu süsteemide säästliku, keskkonnasõbraliku ja ohutu kasutamist.
Nutikas valgusfoor
"Nutikas valgusfoor" on dünaamiline fooride haldussüsteem, tänu millele paraneb liiklusvoogude liiklusvõime. Tihti valgusfoorides määratakse punaste ja roheliste signaalide muutus kindlaks kehtestatud ajakava järgi. Nutikas valgusfoor kasutab signaalide muutmiseks kaameraid. Tavalistes linnades kohtame sageli olukorda, kus seisame punase tule taga, samal ajal kui külgsuunas kedagi pole. Kui nutikas valgusfoor näeb, et ühes suunas liigub palju vähem autosid kui teistes, siis liikumise optimeerimiseks lülitab rohelist värvi ülekoormatud suundadel pikemalt. Just see parandab liikumise vooge ja vähendab mõju autode heitgaasidest keskkonnale. [10][11]

Robotite ehitus (Boston Dynamics robot koera näitel) 2020. aasta mai kuus tuli välja Boston Dynamics robot koer (Spot) Singapuri tänavatele, et jälgida sotsiaalset distantseerumist COVID-19 ajal. Spot suudab trepist üles ronida ja konarlikul maastikul liikuda, kuid on siiski piisavalt väike siseruumides kasutamiseks. Spot suudab saavutada kiirust kuni 5,76 km/h ja töötada autonoomselt kuni 90 minutit. Robot on varustatud stereo kaamerate süsteemiga, mis annavad sellele 360° vaate. Selline kaamerate süsteem põhineb masinnägemisel ja aitab roobotil ruumis navigeerida ja võimaldab otsusi tegema kasutades programmeeritud algoritme. [13]
Tööstus
Tööstus on suur masinnägemise ülesannete generaator, ning sellel on suurim arv võimalikke rakendusi. Tänase maailma kogemus näitab tohutul hulgal lahendatud tootmis probleeme.
Mõned kasutusvaldkonnad:
Tootmisliinid - toidu või mineraalide sorteerimine, ning nende kvaliteedi kontroll;
Infrastruktuuri objektide diagnostika ja sobivate meetmete rakendamine infrastruktuuri parendamisele;
Keevitustööde kontroll ja keevitus protsessi automatiseerimine;
Logistika - toodete oleku ja koguse kontroll
Pildistamine ohtlikes või raskesti ligipääsetavates kohtades [14]
Sõjaväe droonid (Maven tehnoloogia näitel)
2017. aastal Google koostöös USA kaitseministeeriumiga on alustanud projekti Maven, mille raames on plaanis rakendada täiustatud arvutialgoritme objektide tuvastamiseks suurel hulgal liikuvatel või liikumatutel piltidel. Tegelikult on see sõjaväe droonide masinnägemissüsteem. Süsteemi kasutades droonidest saab tuvastada sõidukeid ja muid objekte, jälgida nende liikumist ja edastada tuvastamise tulemused kaitseministeeriumile. [15]
Autojuhti assistendid
Line Assistant

See on tehnoloogia, mis kasutab WAG autodes sisseehitatud kaamerat, mis jälgib, et auto liigub oma sõidurajal. See kaamera asub sisemises tahavaatepeeglis, ning suudab juhtida auto liikumist, jälgides teemärgistust ja reguleerides auto asendit nende märgiste suhtes. Mis on hea selles süsteemis - juhul, kui juhi tähelepanu hajub ja auto teel olevatest rajamärgistest eemale viib, alustab Lane Assist parandusmeetmeid, mis lõppkokkuvõttes vähendab pikkadel sõitudel sõidurajalt välja triivimise tõenäosust. [17]
Front Light Assistant
Front Light Assist kasutatakse sõiduki kaugtulede automaatseks sisse- või väljalülitamiseks. Kui auto seisab, töötavad ainult lähituled, kuid kui auto sõidab pimedas üle 60 km/h, lülitab FLA-süsteem vastutuleva liikluse puudumisel automaatselt sisse kaugtuled. Tahavaatepeeglis olev kaamera jälgib liiklust. Tema abiga tunneb süsteem ära vastutulevad ja samas suunas sõiduki ees liikujad ning lülitub automaatselt tagasi lähituledele. [18]
Tesla Autopilot
Kõikidel uutel Tesla autodel on olemas riistvara, mida on vaja tulevikus täielikuks isejuhtimiseks peaaegu kõikides tingimustes. Süsteem on konstrueeritud nii, et see suudab sooritada lühikesi ja pikki sõite ilma, et juhiistmel istuja oleks midagi vaja teha. Tesla Motors hakkas loobuma radaaridest tema autodes. Selle asemel töötas ettevõte välja Tesla Visioni kaamerasüsteemil põhineva autopiloodi versiooni. [19]
Allikad
- ↑ Machine Vision : Theory, Algorithms, Practicalities - Morgan Kaufmann, 2004
- ↑ https://habr.com/ru/post/350918/
- ↑ Aleksei Šalaginov, Arvutinägemise ajalugu / Aleksei Šalaginov. - Tekst: elektrooniline // shalaginov.com: [sait]. - URL: https://shalaginov.com/2020/05/16/computer-vision-history/.
- ↑ https://www.timetoast.com/timelines/5798d398-efa1-481a-b0db-80c02f9231d2
- ↑ Pavel Bryzgalov, Masinnägemise arengu ajalugu / Bryzgalov Pavel. - Tekst: elektrooniline // robome.ru: [sait]. - URL: http://robome.ru/istorija_razvitija_tehnicheskogo_zrenija/ .
- ↑ Aleksei Šalaginov, Arvutinägemise ajalugu / Aleksei Šalaginov. - Tekst: elektrooniline // shalaginov.com: [sait]. - URL: https://shalaginov.com/2020/05/16/computer-vision-history/.
- ↑ Inishev, Kuidas arvutinägemine töötab? / Inišev. - Tekst: elektrooniline // habr.com: [sait]. - URL: https://habr.com/ru/company/droider/blog/538750/.
- ↑ https://www.google.com/url?sa=i&url=https%3A%2F%2Fmicroblink.com%2Fuse-cases%2Fcase-studies%2Fmath-education-powered-by-mobile-vision-photomath&psig=AOvVaw1qmveqCHSNgpCZFuLGr865&ust=1638719180924000&source=images&cd=vfe&ved=0CAsQjRxqFwoTCPjJ577ByvQCFQAAAAAdAAAAABAD
- ↑ Kasutaja: nokiaman, Arendaja lood: PhotoMath by MicroBlink / nokiaman :. - Tekst: elektrooniline // habr.com: [sait]. - URL: https://habr.com/ru/company/microsoftlumia/blog/248789/.
- ↑ drosselmayer Evolution of smart traffic lights / drosselmayer. — Tekst : elektrooniline // habr.com : [sait]. — URL: https://habr.com/ru/post/125282/
- ↑ Tott Smart Traffic Lights / Tott. — Tekst : elekrooniline // habr.com : [sait]. — URL: https://habr.com/ru/post/553162/ .
- ↑ https://www.google.com/url?sa=i&url=https%3A%2F%2Fwww.silicon.co.uk%2Fe-innovation%2Fresearch%2Frobot-spot-boston-dynamics-345787&psig=AOvVaw04BHft5kYiqPv-xms-4pwc&ust=1638719798447000&source=images&cd=vfe&ved=0CAsQjRxqFwoTCIDk5PjByvQCFQAAAAAdAAAAABAd
- ↑ BostonDynamics Robot-Dog / BostonDynamics. — Текст : электронный // www.bostondynamics.com : [сайт]. — URL: https://www.bostondynamics.com/ .
- ↑ https://nirmech.ru/ : [sait]. — URL: https://nirmech.ru/
- ↑ Alizar, Military drones / alizar. — Tekst : elektrooniline // habr.com : [sait]. — URL: https://habr.com/ru/post/411323/ .
- ↑ https://www.usedvwaudi.com/blog/2019/04/16/what-is-lane-assist--technology-and-how-does-it-work
- ↑ Volkswagen Lane Assist / Volkswagen. - Tekst: elektrooniline // vw.avto-city.ru: [sait]. - URL: https://vw.avto-city.ru/models/preimushchestva/obzor/elektronnyy-pomoshchnik-lane-assist/ .
- ↑ Mark Icons, Kõik Volkswageni autode elektrooniliste abiliste kohta / Icons Mark. - Tekst: elektrooniline // vagdrive.com: [sait]. - URL: https://vagdrive.com/threads/vse-ob-ehlektronnyx-pomoschnikax-avtomobilej-koncerna-volkswagen.1198/ .
- ↑ Tesla autopiloot / Tesla. - Tekst: elektrooniline // www.tesla.com: [sait]. - URL: https://www.tesla.com/autopilot .
