Palmer
From ICO wiki
| Robotex 2012 robot Palmer | |
| File:P1230809 - Palmer.jpg | |
| Informatsioon | |
|---|---|
| Ülikool: | Eesti Infotehnoloogia Kolledž |
| Projekti liikmed: | Karl Kadalipp Matis Palm |
| Juhendaja: | Margus Ernits |
| Asukoht: | Tallinn |
Palmer
Projekti eesmärk
Ehitada ja programmeerida robot, mis võidaks Robotex 2012 robotivõistluse. Robotex 2011 reeglid võib leida siit.
Tarkvara
Kood on kättesaadav soovijatele SVN hoidlast. Roboti tarkvara ehitatakse Botmaster platvormile, mis koosneb Qt ja OpenCV teekidest. OpenCV installeerimise juhised leiab siit.
- Varsti tuleb uus OpenCV 2.2, siis tuleb teha siia uuendus.#
Riistvara
- 3xHBridge - DC mootorite juhtimiseks vajalikud
- Protsessori plaat - Roboti kontroll osa, mis suhtleb roboti juhtarvutiga
- Roboti raam + rattad + mootorid - mehaanilised detailid roboti ülessande täitmiseks
- Chillax emaplaat - Toimub roboti koodi jookustamine ja signaali saatmine edasi protsessori plaati
- Lülitid, kaitsmed jms. - Vajalikud turvalisuse ja mugavuse jaoks
- LiPo - Toide (2x 4S 14.8V 2200mAh + 2x 2S 7.4V ~2000mAh)
Meeskond
| Nimi | Roll |
|---|---|
|
|
|
|
TODO
Peab olema tehtud:
- 2011 roboti dokumentatsioon
- Kokkuvõte Robotexist ja vigade analüüs
- ...
- ...
Teha:
- Roboti põhja velcro (vasak pool)
- Kadunud 5mm diameetriga polt üles leida
- Kontroll-LEDidega lülitid ühele kontrollpaneelile roboti "katusele"
- Konveier-lint stiilis "rullik"
- Rattad ära värvida matt-mustaks
- Vana kood kordatehtud robotiga testida ja siis uut lahendust leiutama hakata (algul lisame teise kaamera)
Hea kui oleks:
- Head tööriistad ehk:
Liimipüstol, termorüüd, LokTide superatak, kruvikeerajad, erinevad metallisaed jne
- ... - [asdasd.jpg]
Logi
01.12.2011 - Robot juppideks kistud, dokumentatsiooni algus.
02.12.2011 - ...
Visuaalne progress
Tulemus
Kasulik materjal
H-bridge



A | B | PWM | 0 | 0 | 0 | V V - Vabakäik 0 | 0 | 1 | P P - Pidurdus 0 | 1 | 0 | V <- - Mootor käib ühte pidi 0 | 1 | 1 | <- -> - Mootor käib teist pidi 1 | 0 | 0 | V 1 | 0 | 1 | -> 162=M1 1 | 1 | 0 | V 163=M2 1 | 1 | 1 | P 164=M3
Cutecom
Aadressid
- 162=Mootor1 vasak esimootor
- 163=Mootor2 tagumine mootor
- 164=Mootor3 parem esimootor
Parameetrid
- 0 = vabakäik
- 1-255 pwm/kiirus ühes suunas AB=0/1 sealjuures 1 on väikseim ja 255 suurim kiirus
- 256-511 pwm/kiirus teises suunas AB=1/0 sealjuures 256 on väikseim ja 511 suurim kiirus
- 512= võiks olla pidur kui kõik töötab ideaalselt.
Servobasic
- 1-10 loe servo väärtus.
- 20-27 loe adc väärtus.
- 129-138 kirjuta servo väärtus.
- 228 salvesta servode väärtused.
- 40 loe kõigi ADC sisendite väärtus, tagastab stringi (NÄIDE : 544,133,124,1,109,173,215,243 )
- 230 reset
- 231 kõik servod välja/sisse. Parameetrid: 1-sisse 2-välja
- 44 kõik analogid ja digitalid (NÄIDE: 88,2,40,36,1023,1011,1023,1022,0,0,0,0,0,0,0,1 )
- Servo nummerdamine 0 - 9
- ADC nummerdamine 0-5
- Löömine 233, 255 on kõik digitalid ühed ja 0 lülitab välja.
Omni kraadid
-
 Seletav joonis: edasliikumine
Seletav joonis: edasliikumine -
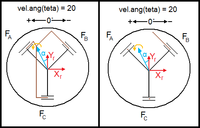 Seletav joonis: keeramine sõidu ajal
Seletav joonis: keeramine sõidu ajal -
 DC mootor
DC mootor -
 Ratas
Ratas




0° - sõidab otse 180° - sõidab tagasi 90° - pöörleb ümber enda vasakule 270° pöörleb paremale
Prose plaat (ehk mikrokontroller) infoga

Andurite, soleka ja majakate Analoog/Digitaal

- Analog 0 - Palli andur
- Analog 1 - Ees vasak andur
- Analog 2 - Ees parem andur
- Analog 3 - Vasak külje andur
- Analog 4 - Parem külje andur
- Analog 5 - Kaugusandur
- Digital 0 - solekas
- Digital 6 - Vasak majaka andur
- Digital 7 - Parem majaka andur
Soleka Relee

Lingid
Robotex 2011 reeglid
USB-RS232 üleminek
installing OpenCV
installing kaamera draiveri paigaldamine ja kasutamine

{kind=link}