Palmer: Difference between revisions
| (58 intermediate revisions by 5 users not shown) | |||
| Line 16: | Line 16: | ||
|- style="vertical-align: top;" | |- style="vertical-align: top;" | ||
| '''Projekti liikmed:''' | | '''Projekti liikmed:''' | ||
| | | ITK roboklubi liikmed :) | ||
|- style="vertical-align: top;" | |- style="vertical-align: top;" | ||
| '''Juhendaja:''' | | '''Juhendaja:''' | ||
| Line 25: | Line 25: | ||
|- style="vertical-align: top;" | |- style="vertical-align: top;" | ||
| '''Töövõidud:''' | | '''Töövõidud:''' | ||
| '''1. koht''' <br> 2009.a Robotex <br> Tiim Madistajad <br> Robot Troller-Roller <br><br> '''5. koht''' <br> 2011.a Robotex <br> Tiim Palmer <br> Robot Palmer | | '''1. koht''' <br> 2009.a Robotex <br> Tiim Madistajad <br> Koosseis : Madis Toom, Allan Vein, Tiina Laast, Tiia Tänav, Janek Sarjas <br> <br> '''Robot Troller-Roller''' <br><br> '''5. koht''' <br> 2011.a Robotex <br> Tiim Palmer <br> <br> Koosseisus: Matis Palm, Meelis Tamm, Karl Kadalipp, Sergei Podust, Valdar Vaht | ||
<br> '''Robot Palmer''' <br> | |||
|} | |} | ||
== Projekti eesmärk == | == Projekti eesmärk == | ||
Ehitada ja programmeerida robot, mis võidaks 2012. a Robotexil vähemalt 4. koha. Robotex | Ehitada ja programmeerida robot, mis võidaks 2012. a Robotexil vähemalt 4. koha. Robotex 2012 reeglid võib leida [http://www.robotex.ee/robotex_2012/reeglid/jalgpall siit]. | ||
Robotex 2012 - 23.-25. november! | |||
Kõik pildid on saadaval : http://public.fotki.com/Frembler/ | |||
== Tarkvara lühitutvustused ja tutorialid == | == Tarkvara lühitutvustused ja tutorialid == | ||
<b>Cutecom</b> | |||
<pre style="font-size: 120%; width:35%; border:1px solid lightgrey;"> | |||
Device:/dev/ttyUSB0 (juhul, kui on läbi USB üleminek, muidu tty0) | |||
Baud rate:115200 | |||
Data bits:8 | |||
stop bits:1 | |||
Select the line end termination: CR line end | |||
</pre> | |||
... | ... | ||
| Line 72: | Line 85: | ||
* Roboti raam + rattad + mootorid - mehaanilised detailid roboti ülessande täitmiseks | * Roboti raam + rattad + mootorid - mehaanilised detailid roboti ülessande täitmiseks | ||
= Tiim Palmer 2011 | = Tiim Palmer 2011= | ||
[[File:ZombiRS.png|200px|right]] | [[File:ZombiRS.png|200px|right]] | ||
<table border="0"> | <table border="0"> | ||
| Line 78: | Line 91: | ||
<th>Nimi</th> | <th>Nimi</th> | ||
<th>Roll</th> | <th>Roll</th> | ||
<tr> | <tr> | ||
<td> | <td> | ||
*Matis Palm</td> | *Matis Palm</td> | ||
<td> | <td> | ||
:Chillax</td> | :Chillax /// Projektijuht</td> | ||
</tr> | </tr> | ||
<tr> | <tr> | ||
| Line 119: | Line 125: | ||
*Sergei Podust</td> | *Sergei Podust</td> | ||
<td> | <td> | ||
:2012.a Robotexil ei osale | :2012.a Robotexil ei osale //Meibi...peale praktikat äkki?ehk suvel vms | ||
</td> | </td> | ||
</tr> | </tr> | ||
| Line 126: | Line 132: | ||
*Meelis Tamm</td> | *Meelis Tamm</td> | ||
<td> | <td> | ||
:2012.a Robotexil ei osale | :2012.a Robotexil ei osale | ||
</td> | |||
</tr> | </tr> | ||
<tr> | <tr> | ||
| Line 132: | Line 139: | ||
*Valdar Vaht</td> | *Valdar Vaht</td> | ||
<td> | <td> | ||
:2012.a Robotexil ei osale | :2012.a Robotexil ei osale | ||
</td> | |||
</tr> | |||
<tr> | |||
<td> | |||
*Karl Kadalipp</td> | |||
<td> | |||
:2012.a Robotexil ei osale</td> | |||
</tr> | </tr> | ||
</table> | </table> | ||
= Tiim Palmer 2012 = | |||
*Matis Palm | |||
*Aleksander Tavgen | |||
*Tauri Metsoja | |||
*Andre Paju | |||
*Tõnu Sein | |||
== TO DO LIST == | == TO DO LIST == | ||
| Line 163: | Line 185: | ||
# Head tööriistad ehk: liimipüstol, termorüüd, LokTide superatak, kruvikeerajad, erinevad metallisaed jne | # Head tööriistad ehk: liimipüstol, termorüüd, LokTide superatak, kruvikeerajad, erinevad metallisaed jne | ||
# Tolmuimeja | # Tolmuimeja | ||
------------------------------------------------------------------------------- | |||
UUUED TEGEMISED | |||
*pallianduri kinnitused - Andre | |||
*löögimehhanismi kinnitused - Andre, Tauri | |||
*valge-musta anduri testimine - 20 eurosed + sumorobotite + rohelised koolist (Mis olemas on) | |||
*ümbris võrgust - Tauri | |||
*disain - Tauri | |||
*kas palli tohib väljast sisse tuua - kontrollida reeglitest | |||
*H-bridge juhtmed lühemaks teha | |||
*elektroonika | |||
*kaamera tehnoloogiat uurida ja progreda - Aleksander peab Margusega kokku saama | |||
*kaamera kõrguse leidmine (nurk) ilma robotita - aleksander | |||
*emaplaadile lisapistik teha enne voolualaldit - teensi otsaga, et saaks kiiresti ühendada uus aku ja toiteplokk taha vajadusel | |||
*majaka andurid. | |||
== Logi == | == Logi == | ||
| Line 212: | Line 250: | ||
... | ... | ||
<br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br> | <br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br><br> | ||
http://wiki.robocup.org/wiki/Middle_Size_League | |||
http://www.tallinnatv.eu/index.php?id=1377 | |||
= Robotex 2012 = | = Robotex 2012 = | ||
| Line 236: | Line 276: | ||
File:P1230740RS.jpg | File:P1230740RS.jpg | ||
File:P1230702PS.jpg | File:P1230702PS.jpg | ||
File:P1230911RS.jpg | File:P1230911RS.jpg | ||
</gallery> | </gallery> | ||
| Line 252: | Line 291: | ||
<gallery widths=200px heights=150px> | <gallery widths=200px heights=150px> | ||
Image:Hbridge_Peeter.jpg | Image:Hbridge_Peeter.jpg | ||
Image:hbridge.png | Image:hbridge.png | ||
Image:hbridge2h.png | Image:hbridge2h.png | ||
Image:Hbridge6-korras.png | |||
</gallery> | </gallery> | ||
roheline juhe A , kollane B, valge PWM, punane 5V | |||
<b>Tõeväärtustabel roboti juhtimiseks</b> | |||
<pre style="font-size: 120%; width:29%; border:1px solid lightgrey;"> | <pre style="font-size: 120%; width:29%; border:1px solid lightgrey;"> | ||
A | B | PWM | | A | B | PWM | | ||
| Line 269: | Line 311: | ||
</pre> | </pre> | ||
PWM'iga mootorit kiiresti sisse-välja lülitades saavutatakse madalam kiirus täiskiirusest. kiirusevahemik on 0-st 255ni | PWM'iga mootorit kiiresti sisse-välja lülitades saavutatakse madalam kiirus täiskiirusest. kiirusevahemik on 0-st 255ni | ||
<table> | |||
{| class="wikitable" | |||
|- | |||
! Toote nr !! Tellitud kogus !! Toote kirjeldus !! Tootja osa nr | |||
|- | |||
| 8649820 || 26 ||MOSFET, P, -55V, -28A, D-PAK; Transistor || IRFR5305PBF | |||
|- | |||
| 9707719 || 40 ||OPTOCOUPLER, TRANSISTOR O/P; No. of Chan || PC817X3J000F | |||
|- | |||
| 1400169 || 100 || RESISTOR, SURGE, 270 OHM 1% 1206; Resist || SG73P2BTTD2700F | |||
|- | |||
| 8651264 || 26|| MOSFET, N, 55V, 36A, D-PAK; Transistor P|| IRLR2905PBF | |||
|} | |||
</table> | |||
==Cutecom== | ==Cutecom== | ||
| Line 312: | Line 371: | ||
== Prose plaat (ehk mikrokontroller) infoga == | == Prose plaat (ehk mikrokontroller) infoga == | ||
http://robot.itcollege.ee/wiki/index.php/File:Prose_tetailne.png | |||
[[File:Prose_plaat_infoga.jpg|600px]] | [[File:Prose_plaat_infoga.jpg|600px]] | ||
[[File:Hbridge.png|600px]] | |||
[[571px-Prose_tetailne.png|571px]] | |||
== Andurite, soleka ja majakate Analoog/Digitaal == | == Andurite, soleka ja majakate Analoog/Digitaal == | ||
| Line 352: | Line 413: | ||
[[File: USBkaabel.jpg|300px]] | [[File: USBkaabel.jpg|300px]] | ||
[[File: USBlayout2.jpg|300px]] | [[File: USBlayout2.jpg|300px]] | ||
== Kontakt == | |||
Tiim Palmer 2013 kooseis: | |||
*Aleksander Tavgen 56804906 | |||
*Matis Palm 5220760, matispalm@gmail.com (Ainult ehitab ei osale Robotexil) | |||
*Tõnu Sein 55525466, kummtumm@gmail.com | |||
*Aleksander Tavgen 56804906 | |||
*Tauri Metsoja ?? | |||
*Andre Padu 53487796 ?? | |||
== Lingid == | == Lingid == | ||
| Line 363: | Line 439: | ||
[http://robot.itcollege.ee/wiki/index.php/Udev_rule_usb_serial USB seriali kasutamise lagi vähendamiseks] <br> | [http://robot.itcollege.ee/wiki/index.php/Udev_rule_usb_serial USB seriali kasutamise lagi vähendamiseks] <br> | ||
[http://robot.itcollege.ee/wiki/index.php/QTimer Taimeri kasutamine koodis] <br> | [http://robot.itcollege.ee/wiki/index.php/QTimer Taimeri kasutamine koodis] <br> | ||
[https://wiki.itcollege.ee/index.php/OpenCV_l%C3%BChikursus OpenCV lühikursus] <br> | |||
[https://wiki.itcollege.ee/index.php/Ps3eye_Linux Ps3eye Linux] <br> | |||
===Riistvara=== | ===Riistvara=== | ||
[ | [https://wiki.itcollege.ee/index.php/RS232_USB_%C3%BCleminek USB-RS232 üleminek]<br> | ||
[https://wiki.itcollege.ee/index.php/Tr%C3%BCkiplaadi_valmistamine Trükiplaadi valmistamine]<br> | [https://wiki.itcollege.ee/index.php/Tr%C3%BCkiplaadi_valmistamine Trükiplaadi valmistamine]<br> | ||
[https://wiki.itcollege.ee/index.php/Lipo_laadimine 4S 14.8V Li-Po aku laadimine]<br> | [https://wiki.itcollege.ee/index.php/Lipo_laadimine 4S 14.8V Li-Po aku laadimine]<br> | ||
[ | [https://wiki.itcollege.ee/index.php/Elektroonika_alg%C3%B5pe_1 Elektroonika algõpe]<br> | ||
Latest revision as of 16:22, 27 March 2014
| Robotex 2012 Robot: Palmer / Tiim: Palmer | |
 | |
 | |
| Informatsioon | |
|---|---|
| Ülikool: | Eesti Infotehnoloogia Kolledž |
| Projekti liikmed: | ITK roboklubi liikmed :) |
| Juhendaja: | Margus Ernits |
| Asukoht: | Tallinn |
| Töövõidud: | 1. koht 2009.a Robotex Tiim Madistajad Koosseis : Madis Toom, Allan Vein, Tiina Laast, Tiia Tänav, Janek Sarjas Robot Troller-Roller 5. koht 2011.a Robotex Tiim Palmer Koosseisus: Matis Palm, Meelis Tamm, Karl Kadalipp, Sergei Podust, Valdar Vaht
|
Projekti eesmärk
Ehitada ja programmeerida robot, mis võidaks 2012. a Robotexil vähemalt 4. koha. Robotex 2012 reeglid võib leida siit.
Robotex 2012 - 23.-25. november!
Kõik pildid on saadaval : http://public.fotki.com/Frembler/
Tarkvara lühitutvustused ja tutorialid
Cutecom
Device:/dev/ttyUSB0 (juhul, kui on läbi USB üleminek, muidu tty0) Baud rate:115200 Data bits:8 stop bits:1 Select the line end termination: CR line end
... Roboti kood käivitatakse käsuga ./botmaster2011 -r robotinimi (näiteks Palmer) , olles directory's botmaster2011 Kompileerimine toimub käsuga make
käivitatakse programm,pilt võetakse failist:
./main.bin -r digipallur -f pilt.bmp (tuleb pilt ette anda, kui kaamera pole ühendatud),testimiseks saab robotikoodina kasutada "testrobot"
näidatakse seadmeid, mis on arvutiga ühendatud:
dmesg
näidatakse, kas usb 0 on küljes:
ls -l /dev/ttyUSB0
opencv testimine, pilt võetakse failist:
./opencvtest pilt.bmp
Riistvara
- Emaplaat - toimub roboti koodi jooksutamine ja signaali saatmine edasi protsessori plaati
- 8GB USB pulk - operatsioonisüsteemi ja vajalike programmide/andmete talletamine
- Protsessori plaat - roboti kontrollosa, mis suhtleb roboti juhtarvutiga
- Varem olid kasutuses ka valged ledid pallide valgustamiseks pimedates väljakunurkades
- PS3 eye, IR andurid, majakaandurid - ümbritseva keskkonna tajumiseks
- Lülitid indikaator-LEDidega, kaitsmed jms - vajalikud turvalisuse ja mugavuse jaoks
- 14.8V to 12V voolualandaja plaat koos jahutusega - emaplaadi toide 4 celliselt Li-Po akult
- LiPo akud (2x 4S 14.8V 2200mAh + 2x 2S 7.4V ~2000mAh) - toide mootori, emaplaadi, protsessori ja jahutussüsteemi jaoks
- 3x H-sild - DC mootorite juhtimiseks vajalikud
- Solenoid - löögimehhanismi tarbeks
- Suure mahutavusega elektrolüütkondensaatorite akupakk - solenoidi kasutamiseks
- Väiksemad elektrolüütkondensaatorid - pinge stabiliseerimiseks
- Feriitrõngad ja (keraamilised) kondensaatorid - mootorimüra varjestamiseks
- Velcro ja poldid-mutrid-seibid - detailide kinnitamiseks
- Roboti raam + rattad + mootorid - mehaanilised detailid roboti ülessande täitmiseks
Tiim Palmer 2011

| Nimi | Roll |
|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tiim Palmer 2012
- Matis Palm
- Aleksander Tavgen
- Tauri Metsoja
- Andre Paju
- Tõnu Sein
TO DO LIST
Peab olema tehtud:
- 2011 roboti dokumentatsioon
- Kokkuvõte Robotexist ja vigade analüüs
- Tiimi kontaktid siia seina peale
- Pildid ja kajastused uudistes alla laadida / ümber lindistada ning kusagile uploadida (nt YouTube ja Picasa)
- Erakogudes olevad pildid (spetsiaalselt selleks tehtud) Picasa galeriidesse toppida ning robowikisse lingid panna
- ...
Teha:
- Roboti põhja velcro (vasak pool)
- Kadunud 5mm diameetriga polt üles leida
- Kontroll-LEDidega lülitid ühele kontrollpaneelile roboti "katusele"
- Konveier-lint stiilis "rullik"
- Rattad ära värvida matt-mustaks
- Vana kood kordatehtud robotiga testida ja siis uut lahendust leiutama hakata (algul lisame teise kaamera)
- Nutisemad connectorid sebida (ja tellida!!!!! ASAP!)
- Silikoonrull valada
- Rattapuksid treida + augud ja keermed
- Varu coilgun ja rullikusüsteem - mõlemad peavad olema kergesti vahetatavad, ent robustsed!
- Palliandurid ja LEDid paremini ära kinnitada/kaitsta
- Promoda Co2 tulekustuteid Robotex 2012 korraldajatele, et Tartukate robotid täitsa mahakandmisele ei läheks ;)
Hea, kui oleks:
- Head tööriistad ehk: liimipüstol, termorüüd, LokTide superatak, kruvikeerajad, erinevad metallisaed jne
- Tolmuimeja
UUUED TEGEMISED
- pallianduri kinnitused - Andre
- löögimehhanismi kinnitused - Andre, Tauri
- valge-musta anduri testimine - 20 eurosed + sumorobotite + rohelised koolist (Mis olemas on)
- ümbris võrgust - Tauri
- disain - Tauri
- kas palli tohib väljast sisse tuua - kontrollida reeglitest
- H-bridge juhtmed lühemaks teha
- elektroonika
- kaamera tehnoloogiat uurida ja progreda - Aleksander peab Margusega kokku saama
- kaamera kõrguse leidmine (nurk) ilma robotita - aleksander
- emaplaadile lisapistik teha enne voolualaldit - teensi otsaga, et saaks kiiresti ühendada uus aku ja toiteplokk taha vajadusel
- majaka andurid.
Logi
Robotex 2011
01.09.2011-26.11.2011 (Üsna random järjekorras)
- Tiimi ja roboti nimi välja mõeldud (1 minut enne regamist)
Elektroonika - 1. korrus
- Hunnik deanse joodetud.
- Prose toitelüliti koos juhtmetega valmis joodetud (oleneb prose paigutusest).
- Fototakistid ja ledid ära joodetud, juhtmete pikkus parajaks tehtud, kuumliimitatud ja paika pandud. (Karl, Meelis)
- Kaamera korralikult ära kinnitatud ja kaader paika pandud(sõltub rullist ja vastupidi). (Karl)
- Rulli konstruktsioon valmis.
- Coilgun.
- Seinaandurid kinnitatud ja ühendatud (4tk).
- Akud tellitud ja kohal (2x 7.4V Karlilt laenatud tho - järgmiseks aastaks uued tellida).
- Ülikorralik kondekapakk joodetud overkill tuuning-juhtmetega (16 AWG silikoonümbrisega), teibitud ja velcrotatud.
- Soleka uus alus valmis.
- Rulli kinnitus tugevamaks ja kindlamaks muudetud, rull paralleelseks pandud. (Meelis ja Karl)
- Akudele velcrod kinnitatud, kuid mitte liimitud!
- Akude asukohad ja juhtmete ühendused normaalsetesse kohtadesse pandud, et Matis ei peaks näppe väänama.
- 2 alumist andurit külgedele vaatama kinnitatud - cutecomis väärtused testitud.
Elektroonika - 2. korrus
- Juhtmestik korras (väljaarvatud ajutised lahendused, mis on tehtud kell 5 hommikul). (Karl)
- Emaplaadi kinnitused olemas, kuid korpus jäigi tegemata.
- Väravalati sensorid kinnitatud.
- Varu H-bridged - olemas, kuid testimata. (Meelis)
- USB pikendused.
- Wifi pulgale usb pikendus otse emaplaadilt.
- Infrapunasaatjad külgede peale väravamajakate tarvis ja testida, üks saatja puudu. Vist sai tehtud.
Elektroonika - 3. korrus
- Tagumine katteplaat valmistatud (vahetult enne võistluspäeva).
- Välised (ajutised) kaitsmed tehtud võistluspäeval.
- Emaplaadi ja värava lülitid kinnitada. (väravalüliti tehtud)
Progremine
- Valdar - arvutada välja värava löömise distanceH viga ja panna muutujasse, arvestame sellega sihtimisel.
- Kirjutada sihtimise funktsiooni mis arvestab värava kaugusega (kaugemalt täpsem).
- Kirjutada viimase palli suuna muutuja ja kasutada seda palli otsimise funktsioonis õige suuna etteandmiseks (värava kohta peaks sama tegema aga see on natuke keerulisem, peaks tegema taimeri mis arvutab kaua aega on möödas viimasest värava nägemisest ja selle järgi arvutama kas oleme väravast üle 180* pööranud või mitte).
- Kirjutada taimerid palli ja värava otsimise täispöörde jaoks, kui täispööre on tehtud hakkame näiteks aeglasemalt tagasi keerlema.
- Kirjutada kood mis arvestab kahe ülemise anduri väärtuseid ja pöörab õigele poole ära kui näeb nendega midagi (väravast pallide võtmise avoid).
- Kirjutada kood mis arvestab küljeandurite väärtuseid ja sõidab vastavalt sellele “külg ees” (sõidunurk ca 60* ?) palli peale.
- Kui see kõik on valmis siis peaks vist tegema veel natuke kiirema (max muutuse step 10pwm) pealesõidu ja lisaks eraldi max speed kui pall on väga kaugel.
- Kollane värav põhjustab kõvasti probleeme.Tuleks kollase värava korral väljak üle käia ennem (läbi) ja siis oma värava ees otsida palle.
- Reedel on testimine TTÜ spordihoones, eks seal näeb kuidas selle valgustusega on täpsemalt. Värava ligidalt ei tunne palli ära. Värava ligidalt nurga all löömine.
- (Edaspidi kasutame väikese nurga alt löömisel Peetri taktikat).
Robotex 2011 - VÕISTLUSE ANALÜÜS

...
http://wiki.robocup.org/wiki/Middle_Size_League
http://www.tallinnatv.eu/index.php?id=1377
Robotex 2012
27.11.2011-30.11.2011
- Rattad vahetatud uute vastu, puksid hetkel veel vanad, kuid Matis lubas paar kuud tagasi uued teha :)
- Tagumine kaitseraam värvitud matt mustaks (Motip camo seeria värvid!)
- Tagumise kaitseraami keskmine laager suurema vastu vahetatud, ülejäänud puhastatud ja tagasi külge pandud (1x 5mm läbimõõduga polt on kadunud!)
- Robo põhjast vasakpoolne velcro eemaldatud ning eraldusplaat ära võetud (meil pole seda tegelikult kunagi vaja olnudki). Sinna tuleb lähiajal uus (õiges mõõdus velcro).
- Tagumine raam kinnitatud, kuid ma tahaks sinna paari lisavidinat
- Roboti sisemus juppideks kistud ja eelnevalt tühjaks tehtud lauale paigutatud
01.12.2011 õhtupoolik
- Eelmise võistlusaasta dokumentatsiooni algus ja lõpp.
02.12.2011
- Homme...
Visuaalne progress








Praegune olek

Kasulik materjal
H-bridge
H-bridge'i näol on tegemist võimenduselemendiga mootori juhtimiseks, kuna mikrokontrollerite pingega ei saa juhtida suuri võimsusi. H-bridge abil saab võimsust suurendada. Võimsus sõltub pinge ruudust. Seda saab kasutada ka muude seadmete juhtimiseks. Asub mikrokontrolleri ja mootori vahel. Tal on 3 sisendit ja 2 väljundit. Sisendid A, B ja PWM ja väljundid a & b. Juhib väikese võimsusega suurt võimsust. Kui A ja B peal on sama pinge, siis mootor ringi ei käi.



roheline juhe A , kollane B, valge PWM, punane 5V
Tõeväärtustabel roboti juhtimiseks
A | B | PWM | 0 | 0 | 0 | V V - Vabakäik 0 | 0 | 1 | P P - Pidurdus 0 | 1 | 0 | V <- - Mootor käib ühte pidi 0 | 1 | 1 | <- -> - Mootor käib teist pidi 1 | 0 | 0 | V 1 | 0 | 1 | -> 162=M1 1 | 1 | 0 | V 163=M2 1 | 1 | 1 | P 164=M3
PWM'iga mootorit kiiresti sisse-välja lülitades saavutatakse madalam kiirus täiskiirusest. kiirusevahemik on 0-st 255ni
| Toote nr | Tellitud kogus | Toote kirjeldus | Tootja osa nr |
|---|---|---|---|
| 8649820 | 26 | MOSFET, P, -55V, -28A, D-PAK; Transistor | IRFR5305PBF |
| 9707719 | 40 | OPTOCOUPLER, TRANSISTOR O/P; No. of Chan | PC817X3J000F |
| 1400169 | 100 | RESISTOR, SURGE, 270 OHM 1% 1206; Resist | SG73P2BTTD2700F |
| 8651264 | 26 | MOSFET, N, 55V, 36A, D-PAK; Transistor P | IRLR2905PBF |
Cutecom
Aadressid
- 162=Mootor1 vasak esimootor
- 163=Mootor2 tagumine mootor
- 164=Mootor3 parem esimootor
Parameetrid
- 0 = vabakäik
- 1-255 pwm/kiirus ühes suunas AB=0/1 sealjuures 1 on väikseim ja 255 suurim kiirus
- 256-511 pwm/kiirus teises suunas AB=1/0 sealjuures 256 on väikseim ja 511 suurim kiirus
- 512= võiks olla pidur kui kõik töötab ideaalselt.
Servobasic
- 1-10 loe servo väärtus.
- 20-27 loe adc väärtus.
- 129-138 kirjuta servo väärtus.
- 228 salvesta servode väärtused.
- 40 loe kõigi ADC sisendite väärtus, tagastab stringi (NÄIDE : 544,133,124,1,109,173,215,243 )
- 230 reset
- 231 kõik servod välja/sisse. Parameetrid: 1-sisse 2-välja
- 44 kõik analogid ja digitalid (NÄIDE: 88,2,40,36,1023,1011,1023,1022,0,0,0,0,0,0,0,1 )
- Servo nummerdamine 0 - 9
- ADC nummerdamine 0-5
- Löömine 233, 255 on kõik digitalid ühed ja 0 lülitab välja.
Omni
-
 Seletav joonis: edasliikumine
Seletav joonis: edasliikumine -
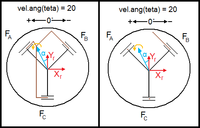 Seletav joonis: keeramine sõidu ajal
Seletav joonis: keeramine sõidu ajal -
 DC mootor
DC mootor -
 Ratas
Ratas




0° - sõidab otse 180° - sõidab tagasi 90° - pöörleb ümber enda vasakule 270° pöörleb paremale
Prose plaat (ehk mikrokontroller) infoga
http://robot.itcollege.ee/wiki/index.php/File:Prose_tetailne.png

 571px
571px
Andurite, soleka ja majakate Analoog/Digitaal

Järgnevad analoogid on antud tulenevalt kasutatud robotist ning ei ole kohustuslikud Anduri juhtme ühendades vastavasse analoogsisendisse, peaks andma vastava anduri väärtuse, olenemata mitmendat analoogi kasutada.
- Analog 0 - Palli andur
- Analog 1 - Ees vasak andur
- Analog 2 - Ees parem andur
- Analog 3 - Vasak külje andur
- Analog 4 - Parem külje andur
- Analog 5 - Kaugusandur
- Digital 0 - solekas
- Digital 6 - Vasak majaka andur
- Digital 7 - Parem majaka andur
Soleka relee

Kondekapakk
- Tuleb eraldi skeem välja joonistada, et tulevikus pangepanemisi poleks (5ne pakk, mis mahutavused, rööbiti joota koos testotstega, deansid!)
Inglisekeelne wiki artikkel kondekatest
-
 Vastupidav ja korralik
Vastupidav ja korralik
(Karli tehtud, kasutusel) -
 Kaheldava väärtusega
Kaheldava väärtusega
(Matise omalooming) -
 Kondekapakk koos ümbrisega
Kondekapakk koos ümbrisega



Majakas

USB



Kontakt
Tiim Palmer 2013 kooseis:
- Aleksander Tavgen 56804906
- Matis Palm 5220760, matispalm@gmail.com (Ainult ehitab ei osale Robotexil)
- Tõnu Sein 55525466, kummtumm@gmail.com
- Aleksander Tavgen 56804906
- Tauri Metsoja ??
- Andre Padu 53487796 ??
Lingid
Tarkvara
Varukoopia tegemine koodist SVN-i abil, TÄHTIS!
GIT
Robovision
OpenCV installeerimine
Kaamera draiveri paigaldamine ja kasutamine
USB seriali kasutamise lagi vähendamiseks
Taimeri kasutamine koodis
OpenCV lühikursus
Ps3eye Linux
Riistvara
USB-RS232 üleminek
Trükiplaadi valmistamine
4S 14.8V Li-Po aku laadimine
Elektroonika algõpe

{kind=link}
{kind=link}