HAL: Difference between revisions
No edit summary |
No edit summary |
||
| Line 56: | Line 56: | ||
== Riistvara == | == Riistvara == | ||
3xHBridge - DC mootorite kasutamiseks vajalikud | * 3xHBridge - DC mootorite kasutamiseks vajalikud | ||
Protsessori plaat - Roboti kontroll osa, mis suhtleb Asusega | * Protsessori plaat - Roboti kontroll osa, mis suhtleb Asusega | ||
Roboti raam + rattad + mootorid - mehaanilised detailid roboti ülessande täitmiseks | * Roboti raam + rattad + mootorid - mehaanilised detailid roboti ülessande täitmiseks | ||
Asus Eee PC - Toimub roboti koodi jookustamine ja signaali saatmine edasi protsessori plaati | * Asus Eee PC - Toimub roboti koodi jookustamine ja signaali saatmine edasi protsessori plaati | ||
Lülitid, kaitsmed jms. - Vajalikud turvalisuse ja mugavuse jaoks | * Lülitid, kaitsmed jms. - Vajalikud turvalisuse ja mugavuse jaoks | ||
Akud - Toide | * Akud - Toide | ||
<gallery> | <gallery> | ||
Revision as of 20:03, 4 January 2011
HAL
Robotex 2010 jalgpallirobot
Eesmmärk
Ehitada ja programmeerida robot mis võidaks Robotex 2010 võistluse. Võistluse reegleid võib lugeda siit. Roboti ehitamiseks on aega ~4 kuud ja selle ajaga peab võistlusreeglitele vastava roboti ehitama.
Meeskonna koosseis
| Nimi | Tegevused |
|---|---|
| Meelis Tamm | Riistvara |
| Martin Lensment | Progemine/Riistvara |
| Mihkel Sokk | Progemine/Wiki |
| Andrus Reedla | Riistvara |
| Silver Kuusik | Abistamine |
TODO
Suur:
- Loe andureid (läbi seina ei saa sõita)
- Drelliakuga välja vahetada mootoriaku
- Solenoid/rull lükata mootoriaku külge
Keskmine:
- Värava valik + indikaator ekraanile
- Väravaandurid dokumenteerida
Väike:
- Teravad ääred maha viilida põhja pealt
- Iseloom - [1]
Arendaja juhendus
Kood on kätte saadav klubi liikmetele klubi SVNist. Pilditöötlus on tehtud OpenCV -d kasutades. Installeerimise juhendi leiab siit.
Riistvara
- 3xHBridge - DC mootorite kasutamiseks vajalikud
- Protsessori plaat - Roboti kontroll osa, mis suhtleb Asusega
- Roboti raam + rattad + mootorid - mehaanilised detailid roboti ülessande täitmiseks
- Asus Eee PC - Toimub roboti koodi jookustamine ja signaali saatmine edasi protsessori plaati
- Lülitid, kaitsmed jms. - Vajalikud turvalisuse ja mugavuse jaoks
- Akud - Toide
-

Prose plaadi joonis
-

HBridge
-

Protsessori plaat
-
Üldvaade
-

Asus
-
DC mootorid
-

rattad
-

seletav joonis: otse liikumine
-
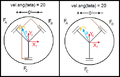
seletav joonis: sõidupealt keeramiseks







Visuaalne progress
-
Solenoidi kondensaator
-

Solenoidi relee
-

Protsessor solenoidi connectoritega


![[1]](http://people.ict.usc.edu/~pynadath/images/hal-9000-eye.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
Logi
09.09.10 - Töölaud leitud, vana roboti lammutamine ning dokumenteerimine
12.09.10 - Juppide testimine, Asuse konfimine (OpenCV + PS3Eye paigas)
Lingid
Robotex 2010 reeglid
USB-RS232 kontroller
OpenCV install
Kaamera draiveri install