HAL: Difference between revisions
No edit summary |
No edit summary |
||
| Line 26: | Line 26: | ||
|} | |} | ||
== | == Goal == | ||
Build and programm a robot that will win the Robotex 2010 competiotion. The rules can be found [http://www.robotex.ee/et/node/341 here]. | |||
We have ~4 months to build a robot that meets the specifications described in the rules. | |||
== | == Team and roles == | ||
<table border="0"> | <table border="0"> | ||
<tr> | <tr> | ||
<th> | <th>Name</th> | ||
<th> | <th>Role</th> | ||
</tr> | </tr> | ||
<tr> | <tr> | ||
<td>Meelis Tamm</td> | <td>Meelis Tamm</td> | ||
<td> | <td>Hardware</td> | ||
</tr> | </tr> | ||
<tr> | <tr> | ||
<td>Martin Lensment</td> | <td>Martin Lensment</td> | ||
<td> | <td>Hardware/Software</td> | ||
</tr> | </tr> | ||
<tr> | <tr> | ||
<td>Mihkel Sokk</td> | <td>Mihkel Sokk</td> | ||
<td> | <td>Software/Wiki</td> | ||
</tr> | </tr> | ||
<tr> | <tr> | ||
<td>Andrus Reedla</td> | <td>Andrus Reedla</td> | ||
<td> | <td>Hardware</td> | ||
</tr> | </tr> | ||
<tr> | <tr> | ||
<td>Silver Kuusik</td> | <td>Silver Kuusik</td> | ||
<td> | <td>Wiki/Debugging/Documentation</td> | ||
</tr> | </tr> | ||
</table> | </table> | ||
| Line 62: | Line 62: | ||
== TODO == | == TODO == | ||
Mandatory: | |||
# | # Read the sensor for avoiding hard collisions with walls and opponent | ||
# | # Replace the motor battery with the drill battery | ||
# | # Connect the coilgun and ballroll to the drill battery | ||
# Choosing the goal and indicating it on the screen | |||
Secondary: | |||
# Väravaandurid dokumenteerida | # Väravaandurid dokumenteerida | ||
== | Nice to have: | ||
# Polish sharp edges from the bottom | |||
# Make a personality for the robot - [http://people.ict.usc.edu/~pynadath/images/hal-9000-eye.jpg] | |||
== Software == | |||
The code is available for the robotics club members from the club SVN repository. The image processing is build up on using OpenCV -d. The installing instructions can be found [http://robot.itcollege.ee/wiki/index.php/Opencv_installeerimine here]. The whole platform is build up using QT libraries. | |||
== | == Hardware == | ||
* 3xHBridge - DC mootorite kasutamiseks vajalikud | * 3xHBridge - DC mootorite kasutamiseks vajalikud | ||
| Line 88: | Line 89: | ||
<gallery> | <gallery> | ||
Image:Prose_plaat_infoga.jpg| | Image:Prose_plaat_infoga.jpg| the microcontroller | ||
Image:Hbridge.jpg| HBridge | Image:Hbridge.jpg| HBridge | ||
Image:Asus.jpg| Asus | Image:Asus.jpg| Asus | ||
Image:412px-Mootorid.jpg| DC | Image:412px-Mootorid.jpg| DC motor | ||
Image:Omniwheelkinnitusega.jpg| | Image:Omniwheelkinnitusega.jpg| wheels | ||
Image:Allinone.png| seletav joonis: | Image:Allinone.png| seletav joonis: moving forward | ||
Image:Teineee.png| seletav joonis: | Image:Teineee.png| seletav joonis: turning while moveing | ||
</gallery> | </gallery> | ||
== | == Visual progress == | ||
<gallery> | <gallery> | ||
Image:Solenoidi_kondensaator.jpg| | Image:Solenoidi_kondensaator.jpg| coilgun capacitors | ||
Image:Solenoidi_relee.jpg| | Image:Solenoidi_relee.jpg| coilgun relay | ||
Image:Protsessor.jpg| | Image:Protsessor.jpg| microcontroller with the coilgun connectors | ||
</gallery> | </gallery> | ||
== Logi == | == Logi == | ||
'''09.09.10''' - | '''09.09.10''' - Found a table to work on, disassemling the old robot and documenting it<br /> | ||
'''12.09.10''' - | '''12.09.10''' - Testing all the parts, configuring Asus (OpenCV + PS3Eye) | ||
== | == Links == | ||
[http://www.robotex.ee/et/node/341 Robotex 2010 | [http://www.robotex.ee/et/node/341 Robotex 2010 rules]<br /> | ||
[http://robot.itcollege.ee/wiki/index.php/ServoBasic_kontroller USB-RS232 | [http://robot.itcollege.ee/wiki/index.php/ServoBasic_kontroller USB-RS232 controller]<br /> | ||
[https://wiki.itcollege.ee/index.php/OpenCV_installeerimine OpenCV | [https://wiki.itcollege.ee/index.php/OpenCV_installeerimine installing OpenCV]<br /> | ||
[https://wiki.itcollege.ee/index.php/Ps3eye_Linux | [https://wiki.itcollege.ee/index.php/Ps3eye_Linux installing camera draiver] | ||
Revision as of 00:15, 5 January 2011
| Robotex 2010 robot HAL | |
| 300px | |
| Informatsioon | |
|---|---|
| School: | Eesti Infotehnoloogia Kolledž |
| Project members: | Meelis Tamm Martin Lensment Mihkel Sokk Silver Kuusik Andrus Reedla |
| Supervisor: | Margus Ernits |
| Location: | Tallinn |
| Date: | September 2010 |
Goal
Build and programm a robot that will win the Robotex 2010 competiotion. The rules can be found here. We have ~4 months to build a robot that meets the specifications described in the rules.
Team and roles
| Name | Role |
|---|---|
| Meelis Tamm | Hardware |
| Martin Lensment | Hardware/Software |
| Mihkel Sokk | Software/Wiki |
| Andrus Reedla | Hardware |
| Silver Kuusik | Wiki/Debugging/Documentation |
TODO
Mandatory:
- Read the sensor for avoiding hard collisions with walls and opponent
- Replace the motor battery with the drill battery
- Connect the coilgun and ballroll to the drill battery
- Choosing the goal and indicating it on the screen
Secondary:
- Väravaandurid dokumenteerida
Nice to have:
- Polish sharp edges from the bottom
- Make a personality for the robot - [1]
Software
The code is available for the robotics club members from the club SVN repository. The image processing is build up on using OpenCV -d. The installing instructions can be found here. The whole platform is build up using QT libraries.
Hardware
- 3xHBridge - DC mootorite kasutamiseks vajalikud
- Protsessori plaat - Roboti kontroll osa, mis suhtleb Asusega
- Roboti raam + rattad + mootorid - mehaanilised detailid roboti ülessande täitmiseks
- Asus Eee PC - Toimub roboti koodi jookustamine ja signaali saatmine edasi protsessori plaati
- Lülitid, kaitsmed jms. - Vajalikud turvalisuse ja mugavuse jaoks
- Akud - Toide
-

the microcontroller
-

HBridge
-

Asus
-

DC motor
-

wheels
-

seletav joonis: moving forward
-
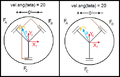
seletav joonis: turning while moveing







Visual progress
-

coilgun capacitors
-

coilgun relay
-

microcontroller with the coilgun connectors



{kind=link}
![[1]](http://people.ict.usc.edu/~pynadath/images/hal-9000-eye.jpg){kind=link}
Logi
09.09.10 - Found a table to work on, disassemling the old robot and documenting it
12.09.10 - Testing all the parts, configuring Asus (OpenCV + PS3Eye)
Links
Robotex 2010 rules
USB-RS232 controller
installing OpenCV
installing camera draiver