HAL: Difference between revisions
From ICO wiki
Jump to navigationJump to search
No edit summary |
|||
| (6 intermediate revisions by 2 users not shown) | |||
| Line 10: | Line 10: | ||
! colspan="2" style="background: #FFDEAD; text-align: center; font-size: larger;" | '''Informatsioon''' | ! colspan="2" style="background: #FFDEAD; text-align: center; font-size: larger;" | '''Informatsioon''' | ||
|- style="vertical-align: top;" | |- style="vertical-align: top;" | ||
| ''' | | '''Kool:''' | ||
| Eesti Infotehnoloogia Kolledž | | Eesti Infotehnoloogia Kolledž | ||
|- style="vertical-align: top;" | |- style="vertical-align: top;" | ||
| ''' | | '''Projekti liikmed:''' | ||
| Meelis Tamm<br />Martin Lensment<br />Mihkel Sokk<br />Silver Kuusik<br />Andrus Reedla | | Meelis Tamm<br />Martin Lensment<br />Mihkel Sokk<br />Silver Kuusik<br />Andrus Reedla | ||
|- style="vertical-align: top;" | |- style="vertical-align: top;" | ||
| ''' | | '''Juhendaja:''' | ||
| Margus Ernits | | Margus Ernits | ||
|- style="vertical-align: top;" | |- style="vertical-align: top;" | ||
| ''' | | '''Asukoht:''' | ||
| Tallinn | | Tallinn | ||
|- style="vertical-align: top;" | |- style="vertical-align: top;" | ||
| ''' | | '''Kuupäev:''' | ||
| September 2010 | | September 2010 | ||
|} | |} | ||
== | == Projekti eesmärk == | ||
Ehitaja ja programmeerida robot, mis võidaks Robotex 2010 robotivõistluse. Robotexi reeglid võib leida [http://www.robotex.ee/et/node/341 siit]. | |||
Roboti ehitamiseks, mis vastaks antud nõetele, oli aega ~4 kuud. | |||
== | == Meeskond ja rollid == | ||
<table border=" | <table border="0"> | ||
<tr> | <tr> | ||
<th> | <th>Nimi</th> | ||
<th> | <th>Roll</th> | ||
</tr> | </tr> | ||
<tr> | <tr> | ||
<td>Meelis Tamm</td> | <td>Meelis Tamm</td> | ||
<td> | <td>riistvara/testimine</td> | ||
</tr> | </tr> | ||
<tr> | <tr> | ||
<td>Martin Lensment</td> | <td>Martin Lensment</td> | ||
<td> | <td>riistvara/tarkvara</td> | ||
</tr> | </tr> | ||
<tr> | <tr> | ||
<td>Mihkel Sokk</td> | <td>Mihkel Sokk</td> | ||
<td> | <td>tarkvara/viki</td> | ||
</tr> | </tr> | ||
<tr> | <tr> | ||
<td>Andrus Reedla</td> | <td>Andrus Reedla</td> | ||
<td> | <td>riistvara</td> | ||
</tr> | </tr> | ||
<tr> | <tr> | ||
<td>Silver Kuusik</td> | <td>Silver Kuusik</td> | ||
<td> | <td>viki/testimine/dokumentatsioon</td> | ||
</tr> | </tr> | ||
</table> | </table> | ||
| Line 62: | Line 62: | ||
== TODO == | == TODO == | ||
Peab olema tehtud: | |||
# | # Lugeda andureid, et vältida kokkupõrkeid seite ja vastasrobotiga - andrus | ||
# | # Asendada vana mootori aku trelli akuga - meelis | ||
# | # Ühendada [[solenoid]] ja pallirull trelli akuga - meelis | ||
# | # Värava valik klaviatuurilt ja näitamine ekraanil - martin | ||
Teha: | |||
# Väravaandurid dokumenteerida | # Väravaandurid dokumenteerida | ||
Hea kui oleks: | |||
# | # Lihvida teravad ääred roboti põhjalt | ||
# | # Anda robotile oma isiksus - [http://people.ict.usc.edu/~pynadath/images/hal-9000-eye.jpg] | ||
== | == Tarkvara == | ||
Kood on kätte saadav soovijatele SVN hoidlast. Roboti tarkvara ehitatakse Botmaster platvormile, mis koosneb Qt ja OpenCV teekidest. OpenCV installeerimise juhised leiab [http://robot.itcollege.ee/wiki/index.php/Opencv_installeerimine siit]. | |||
#Varsti tuleb uus OpenCV 2.2, siis tuleb teha siia uuendus.# | |||
== | == Riistvara == | ||
* 3xHBridge - DC mootorite | * 3xHBridge - DC mootorite juhtimiseks vajalikud | ||
* Protsessori plaat - Roboti kontroll osa, mis suhtleb | * Protsessori plaat - Roboti kontroll osa, mis suhtleb roboti juhtarvutiga | ||
* Roboti raam + rattad + mootorid - mehaanilised detailid roboti ülessande täitmiseks | * Roboti raam + rattad + mootorid - mehaanilised detailid roboti ülessande täitmiseks | ||
* Asus Eee PC - Toimub roboti koodi jookustamine ja signaali saatmine edasi protsessori plaati | * Asus Eee PC - Toimub roboti koodi jookustamine ja signaali saatmine edasi protsessori plaati | ||
| Line 89: | Line 90: | ||
<gallery> | <gallery> | ||
Image:Prose_plaat_infoga.jpg| | Image:Prose_plaat_infoga.jpg| mikrokontroller | ||
Image:Hbridge.jpg| | Image:Hbridge.jpg| H-sild | ||
Image:Asus. | Image:Asus.png| Asus | ||
Image:412px-Mootorid.jpg| DC | Image:412px-Mootorid.jpg| DC mootor | ||
Image:Omniwheelkinnitusega.jpg| | Image:Omniwheelkinnitusega.jpg| rattad | ||
Image:Allinone.png| seletav joonis: | Image:Allinone.png| seletav joonis: edasi liikumine | ||
Image:Teineee.png| seletav joonis: | Image:Teineee.png| seletav joonis: keeramine sõidupealt | ||
</gallery> | </gallery> | ||
== | == Visuaalne progress == | ||
<gallery> | <gallery> | ||
Image:Solenoidi_kondensaator.jpg| | Image:Solenoidi_kondensaator.jpg| solenoidi kondensaatorid | ||
Image:Solenoidi_relee.jpg| | Image:Solenoidi_relee.jpg| solenoidi relee | ||
Image:Protsessor.jpg| | Image:Protsessor.jpg| mikrokontroller solenoidi pistikuga | ||
</gallery> | </gallery> | ||
== Logi == | == Logi == | ||
'''09.09.10''' - | '''09.09.10''' - Leiti laud millel töödata, vana roboti lammutamine ja dokumenteerimine<br /> | ||
'''12.09.10''' - | '''12.09.10''' - Kõikide allsüsteemide testimine, juhtarvuti konfigureerimine (OpenCV + PS3Eye) | ||
== | == Tulemus == | ||
<gallery> | <gallery> | ||
| Line 117: | Line 118: | ||
</gallery> | </gallery> | ||
== | == Lingid == | ||
[http://www.robotex.ee/et/node/341 Robotex 2010 | [http://www.robotex.ee/et/node/341 Robotex 2010 reeglid]<br /> | ||
[http://robot.itcollege.ee/wiki/index.php/ServoBasic_kontroller USB-RS232 | [http://robot.itcollege.ee/wiki/index.php/ServoBasic_kontroller USB-RS232 üleminek]<br /> | ||
[https://wiki.itcollege.ee/index.php/OpenCV_installeerimine installing OpenCV]<br /> | [https://wiki.itcollege.ee/index.php/OpenCV_installeerimine installing OpenCV]<br /> | ||
[https://wiki.itcollege.ee/index.php/Ps3eye_Linux installing | [https://wiki.itcollege.ee/index.php/Ps3eye_Linux installing kaamera draiveri paigaldamine ja kasutamine] | ||
Latest revision as of 12:42, 20 September 2012
| Robotex 2010 robot HAL | |
| 300px | |
| Informatsioon | |
|---|---|
| Kool: | Eesti Infotehnoloogia Kolledž |
| Projekti liikmed: | Meelis Tamm Martin Lensment Mihkel Sokk Silver Kuusik Andrus Reedla |
| Juhendaja: | Margus Ernits |
| Asukoht: | Tallinn |
| Kuupäev: | September 2010 |
Projekti eesmärk
Ehitaja ja programmeerida robot, mis võidaks Robotex 2010 robotivõistluse. Robotexi reeglid võib leida siit. Roboti ehitamiseks, mis vastaks antud nõetele, oli aega ~4 kuud.
Meeskond ja rollid
| Nimi | Roll |
|---|---|
| Meelis Tamm | riistvara/testimine |
| Martin Lensment | riistvara/tarkvara |
| Mihkel Sokk | tarkvara/viki |
| Andrus Reedla | riistvara |
| Silver Kuusik | viki/testimine/dokumentatsioon |
TODO
Peab olema tehtud:
- Lugeda andureid, et vältida kokkupõrkeid seite ja vastasrobotiga - andrus
- Asendada vana mootori aku trelli akuga - meelis
- Ühendada solenoid ja pallirull trelli akuga - meelis
- Värava valik klaviatuurilt ja näitamine ekraanil - martin
Teha:
- Väravaandurid dokumenteerida
Hea kui oleks:
- Lihvida teravad ääred roboti põhjalt
- Anda robotile oma isiksus - [1]
Tarkvara
Kood on kätte saadav soovijatele SVN hoidlast. Roboti tarkvara ehitatakse Botmaster platvormile, mis koosneb Qt ja OpenCV teekidest. OpenCV installeerimise juhised leiab siit.
- Varsti tuleb uus OpenCV 2.2, siis tuleb teha siia uuendus.#
Riistvara
- 3xHBridge - DC mootorite juhtimiseks vajalikud
- Protsessori plaat - Roboti kontroll osa, mis suhtleb roboti juhtarvutiga
- Roboti raam + rattad + mootorid - mehaanilised detailid roboti ülessande täitmiseks
- Asus Eee PC - Toimub roboti koodi jookustamine ja signaali saatmine edasi protsessori plaati
- Lülitid, kaitsmed jms. - Vajalikud turvalisuse ja mugavuse jaoks
- Akud - Toide
-
 mikrokontroller
mikrokontroller -
 H-sild
H-sild -
 Asus
Asus -
 DC mootor
DC mootor -
 rattad
rattad -
 seletav joonis: edasi liikumine
seletav joonis: edasi liikumine -
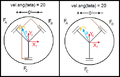 seletav joonis: keeramine sõidupealt
seletav joonis: keeramine sõidupealt







Visuaalne progress
-
 solenoidi kondensaatorid
solenoidi kondensaatorid -
 solenoidi relee
solenoidi relee -
 mikrokontroller solenoidi pistikuga
mikrokontroller solenoidi pistikuga



Logi
09.09.10 - Leiti laud millel töödata, vana roboti lammutamine ja dokumenteerimine
12.09.10 - Kõikide allsüsteemide testimine, juhtarvuti konfigureerimine (OpenCV + PS3Eye)
Tulemus
Lingid
Robotex 2010 reeglid
USB-RS232 üleminek
installing OpenCV
installing kaamera draiveri paigaldamine ja kasutamine

{kind=link}
![[1]](http://people.ict.usc.edu/~pynadath/images/hal-9000-eye.jpg){kind=link}